Formula per l'energia meccanica totale di un pendolo a molla oscillante. Vibrazioni libere. Pendolo a molla. Definizioni di pendolo a molla
Definizione 1
Le vibrazioni libere possono verificarsi sotto l'influenza di forze interne solo dopo che l'intero sistema è stato rimosso dalla posizione di equilibrio.
Affinché le oscillazioni avvengano secondo la legge armonica, è necessario che la forza che riporta il corpo nella posizione di equilibrio sia proporzionale allo spostamento del corpo dalla posizione di equilibrio e diretta nella direzione opposta allo spostamento.
F (t) = m a (t) = - m ω 2 X (t) .
La relazione dice che ω è la frequenza di un'oscillazione armonica. Questa proprietà è caratteristica della forza elastica entro i limiti di applicabilità della legge di Hooke:
F y p r = - k x .
Definizione 2
Vengono chiamate forze di qualsiasi natura che soddisfano la condizione quasi elastico.
Cioè, un carico con massa m attaccato ad una molla di rigidezza k con un'estremità fissa, mostrata in Figura 2. 2. 1, costituiscono un sistema in grado di eseguire vibrazioni libere da armoniche in assenza di attrito.
Definizione 3
Un peso posto su una molla è chiamato oscillatore armonico lineare.
Disegno 2 . 2 . 1 . Oscillazioni di un carico su una molla. Non c'è attrito.
Frequenza circolare
La frequenza circolare ω 0 si trova applicando la formula della seconda legge di Newton:
m un = - k X = m ω 0 2 X .
Quindi otteniamo:
Definizione 4
La frequenza ω 0 viene chiamata frequenza naturale del sistema oscillatorio.
Il periodo delle oscillazioni armoniche del carico sulla molla T è determinato dalla formula:
T = 2 π ω 0 = 2 π m K .
Grazie alla disposizione orizzontale del sistema di carico a molla, la forza di gravità viene compensata dalla forza di reazione del supporto. Quando si sospende un carico su una molla, la direzione della gravità segue la linea di movimento del carico. La posizione di equilibrio della molla tesa è pari a:
x 0 = m g k , mentre si verificano oscillazioni attorno ad un nuovo stato di equilibrio. Sono valide le formule per la frequenza naturale ω 0 e il periodo di oscillazione T nelle espressioni precedenti.
Definizione 5
Data la connessione matematica esistente tra l'accelerazione del corpo a e la coordinata x, il comportamento del sistema oscillatorio è caratterizzato da una descrizione rigorosa: l'accelerazione è la derivata seconda della coordinata del corpo x rispetto al tempo t:
La descrizione della seconda legge di Newton con un carico su una molla sarà scritta come:
m a - m x = - k x, oppure x ¨ + ω 0 2 x = 0, dove frequenza libera ω 0 2 = k m.
Se i sistemi fisici dipendono dalla formula x ¨ + ω 0 2 x = 0, allora sono in grado di eseguire movimenti armonici oscillatori liberi con ampiezze diverse. Ciò è possibile perché viene utilizzato x = x m cos (ω t + φ 0).
Definizione 6Viene chiamata un'equazione della forma x ¨ + ω 0 2 x = 0 equazioni delle vibrazioni libere. Loro proprietà fisiche può solo determinare la frequenza naturale delle oscillazioni ω 0 o il periodo T.
L'ampiezza x m e la fase iniziale φ 0 vengono trovate utilizzando un metodo che le ha portate fuori dallo stato di equilibrio dell'istante iniziale.
Esempio 1
In presenza di un carico spostato dalla posizione di equilibrio ad una distanza ∆ le un momento di tempo pari a t = 0, si abbassa senza velocità iniziale. Allora x m = ∆ l, φ 0 = 0. Se il carico era nella posizione di equilibrio, durante la spinta viene trasmessa la velocità iniziale ± υ 0, quindi x m = m k υ 0, φ 0 = ± π 2.
L'ampiezza x m con fase iniziale φ 0 è determinata dalla presenza delle condizioni iniziali.

Figura 2. 2. 2. Modello delle oscillazioni libere di un carico su una molla.
I sistemi oscillatori meccanici si distinguono per la presenza di forze di deformazione elastica in ciascuno di essi. Figura 2. 2. 2 mostra l'analogo angolare di un oscillatore armonico che esegue oscillazioni torsionali. Il disco è posizionato orizzontalmente ed è appeso ad un filo elastico fissato al suo centro di massa. Se viene ruotato di un angolo θ, si verifica un momento di forza di deformazione torsionale elastica M y p p:
M y p r = - x θ .
Questa espressione non corrisponde alla legge di Hooke per la deformazione torsionale. Il valore x è simile alla rigidezza della molla k. Scrivere la seconda legge di Newton per movimento rotatorio il disco prende la forma
I ε = M y p p = - x θ oppure I θ ¨ = - x θ, dove il momento di inerzia è indicato con I = IC e ε è l'accelerazione angolare.
Allo stesso modo con la formula del pendolo a molla:
ω 0 = X io , T = 2 π io X .
L'uso di un pendolo a torsione è presente negli orologi meccanici. Si chiama bilanciatore, in cui il momento delle forze elastiche viene creato utilizzando una molla a spirale.
Figura 2. 2. 3. Pendolo di torsione.
Se noti un errore nel testo, evidenzialo e premi Ctrl+Invio
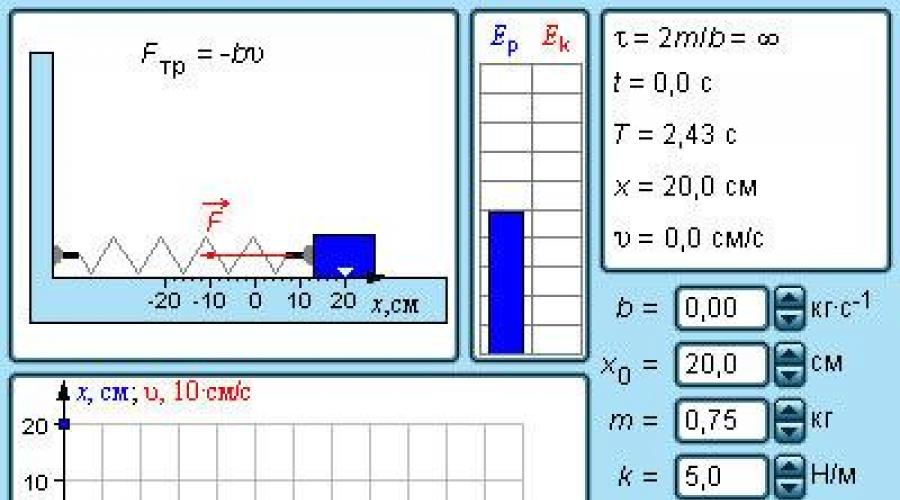
Un pendolo a molla è un sistema oscillatorio costituito da un punto materiale di massa m e da una molla. Consideriamo un pendolo a molla orizzontale (Fig. 1, a). È costituito da un corpo massiccio, forato al centro e posto su un'asta orizzontale, lungo la quale può scorrere senza attrito (un sistema oscillante ideale). L'asta è fissata tra due supporti verticali.
Una molla senza peso è attaccata al corpo ad un'estremità. L'altra estremità è fissata al supporto, che nel caso più semplice è a riposo rispetto a sistema inerziale punto di riferimento in cui oscilla il pendolo. All'inizio la molla non è deformata e il corpo è nella posizione di equilibrio C. Se, allungando o comprimendo la molla, il corpo viene portato fuori dalla posizione di equilibrio, allora su di esso inizierà ad agire una forza elastica da il lato della molla deformata, sempre rivolto verso la posizione di equilibrio.
Comprimiamo la molla, spostando il corpo nella posizione A, e rilasciamola. Sotto l'influenza della forza elastica, si muoverà più velocemente. In questo caso, nella posizione A, sul corpo agisce la massima forza elastica, poiché qui l'allungamento assoluto x m della molla è maggiore. Pertanto in questa posizione l'accelerazione è massima. Man mano che il corpo si sposta verso la posizione di equilibrio, l'allungamento assoluto della molla diminuisce e, di conseguenza, diminuisce l'accelerazione impressa dalla forza elastica. Ma poiché l'accelerazione durante un dato movimento è co-diretta con la velocità, la velocità del pendolo aumenta e nella posizione di equilibrio sarà massima.
Raggiunta la posizione di equilibrio C, il corpo non si fermerà (anche se in questa posizione la molla non è deformata e la forza elastica è zero), ma avendo velocità si sposterà ulteriormente per inerzia, allungando la molla. La forza elastica che si genera è ora diretta contro il movimento del corpo e lo rallenta. Nel punto D la velocità del corpo sarà pari a zero e l'accelerazione sarà massima, il corpo si fermerà per un momento, dopodiché, sotto l'influenza della forza elastica, inizierà a muoversi nella direzione opposta , alla posizione di equilibrio. Superatolo nuovamente per inerzia, il corpo, comprimendo la molla e rallentando il movimento, raggiungerà il punto A (non essendoci attrito), cioè completerà uno swing completo. Successivamente, il movimento del corpo verrà ripetuto nella sequenza descritta. Quindi, le ragioni delle oscillazioni libere di un pendolo a molla sono l'azione della forza elastica che si verifica quando la molla è deformata e l'inerzia del corpo.
Secondo la legge di Hooke, Fx = -kx. Secondo la seconda legge di Newton, F x = ma x. Pertanto, ma x = -kx. Da qui
Equazione dinamica del moto di un pendolo a molla.
Vediamo che l'accelerazione è direttamente proporzionale alla miscelazione ed è diretta in senso opposto ad essa. Confrontando l'equazione risultante con l'equazione delle vibrazioni armoniche ![]() , vediamo che il pendolo a molla esegue oscillazioni armoniche con frequenza ciclica
, vediamo che il pendolo a molla esegue oscillazioni armoniche con frequenza ciclica
Periodo di oscillazione di un pendolo a molla.
Utilizzando la stessa formula, puoi calcolare il periodo di oscillazione di un pendolo a molla verticale (Fig. 1. b). Nella posizione di equilibrio, infatti, a causa dell'azione della gravità, la molla è già allungata di una certa quantità x 0, determinata dalla relazione mg = kx 0. Quando il pendolo viene spostato dalla posizione di equilibrio O su x, la proiezione della forza elastica
Se la palla viene spostata dalla posizione di equilibrio di una distanza x, l'allungamento della molla diventerà pari a Δl 0 + x. Quindi la forza risultante assumerà il valore:
Tenendo conto della condizione di equilibrio (1.7.1), otteniamo:
Il segno meno indica che lo spostamento e la forza hanno direzioni opposte.
La forza elastica f ha le seguenti proprietà:
- È proporzionale allo spostamento della palla dalla sua posizione di equilibrio;
- È sempre diretto verso la posizione di equilibrio.
Per imprimere uno spostamento x al sistema è necessario compiere un lavoro contro la forza elastica:
Questo lavoro serve a creare una riserva di energia potenziale del sistema:
Sotto l'azione di una forza elastica, la palla si sposterà verso la posizione di equilibrio con una velocità sempre crescente. Pertanto l'energia potenziale del sistema diminuirà, ma l'energia cinetica aumenterà (trascuriamo la massa della molla). Raggiunta la posizione di equilibrio, la palla continuerà a muoversi per inerzia. Questo è un movimento lento e si fermerà quando l'energia cinetica sarà completamente convertita in energia potenziale. Quindi lo stesso processo avverrà quando la palla si muove nella direzione opposta. Se non c'è attrito nel sistema, la palla oscillerà indefinitamente.
L'equazione della seconda legge di Newton in questo caso è:
Trasformiamo l'equazione in questo modo:
Introducendo la notazione , otteniamo un'equazione differenziale lineare omogenea del secondo ordine:
Per sostituzione diretta è facile verificare che la soluzione generale dell'equazione (1.7.8) ha la forma:
dove a - ampiezza e φ - fase iniziale dell'oscillazione - valori costanti. Di conseguenza, l'oscillazione del pendolo a molla è armonica (Fig. 1.7.2).

Riso. 1.7.2. Oscillazione armonica
A causa della periodicità del coseno vari stati sistema oscillatorio si ripetono dopo un certo periodo di tempo (periodo di oscillazione) T, durante il quale la fase di oscillazione riceve un incremento di 2π. Puoi calcolare il periodo utilizzando l'uguaglianza:
da cui segue:
Il numero di oscillazioni per unità di tempo è chiamato frequenza:
L'unità di frequenza è la frequenza di tale oscillazione, il cui periodo è 1 s. Questa unità è chiamata 1 Hz.
Dalla (1.7.11) segue che:
Pertanto, ω 0 è il numero di oscillazioni completate in 2π secondi. La quantità ω 0 è chiamata frequenza circolare o ciclica. Utilizzando (1.7.12) e (1.7.13), scriviamo:
Differenziando () rispetto al tempo, otteniamo un'espressione per la velocità della palla:
Dalla (1.7.15) segue che anche la velocità cambia secondo una legge armonica e anticipa lo sfasamento di ½π. Differenziando (1.7.15), otteniamo l'accelerazione:
1.7.2. Pendolo matematico
Pendolo matematico chiamare un sistema idealizzato costituito da un filo inestensibile e senza peso su cui è sospeso un corpo, la cui intera massa è concentrata in un punto.
La deviazione del pendolo dalla posizione di equilibrio è caratterizzata dall'angolo φ formato dal filo con la verticale (Fig. 1.7.3).

Riso. 1.7.3. Pendolo matematico
Quando il pendolo si discosta dalla posizione di equilibrio si crea un momento rotatorio che tende a riportare il pendolo nella posizione di equilibrio:
Scriviamo l'equazione per la dinamica del moto rotatorio del pendolo, tenendo conto che il suo momento di inerzia è pari a ml 2:
Questa equazione può essere ridotta alla forma:
Limitandoci al caso di piccole oscillazioni sinφ ≈ φ ed introducendo la notazione:
l’equazione (1.7.19) può essere rappresentata come segue:
che coincide nella forma con l'equazione delle oscillazioni di un pendolo a molla. Pertanto la sua soluzione sarà un’oscillazione armonica:
Dalla (1.7.20) segue che la frequenza ciclica delle oscillazioni di un pendolo matematico dipende dalla sua lunghezza e dall'accelerazione di gravità. Utilizzando la formula per il periodo di oscillazione () e (1.7.20), otteniamo la nota relazione:
1.7.3. Pendolo fisico
Si chiama pendolo fisico solido, capace di oscillare attorno ad un punto fisso che non coincide con il centro di inerzia. Nella posizione di equilibrio, il centro d'inerzia del pendolo C si trova sotto il punto di sospensione O sulla stessa verticale (Fig. 1.7.4).

Riso. 1.7.4. Pendolo fisico
Quando il pendolo si discosta dalla posizione di equilibrio di un angolo φ, si verifica un momento rotatorio che tende a riportare il pendolo nella posizione di equilibrio:
dove m è la massa del pendolo, l è la distanza tra il punto di sospensione e il centro di inerzia del pendolo.
Scriviamo l'equazione per la dinamica del moto rotatorio del pendolo, tenendo conto che il suo momento di inerzia è uguale a I:
Per piccole vibrazioni sinφ ≈ φ. Quindi, introducendo la notazione:
che coincide anche nella forma con l'equazione delle oscillazioni di un pendolo a molla. Dalle equazioni (1.7.27) e (1.7.26) ne consegue che per piccole deviazioni del pendolo fisico dalla posizione di equilibrio, esegue un'oscillazione armonica, la cui frequenza dipende dalla massa del pendolo, dal momento di inerzia e la distanza tra l'asse di rotazione e il centro di inerzia. Utilizzando (1.7.26), puoi calcolare il periodo di oscillazione:
Confrontando le formule (1.7.28) e () otteniamo che un pendolo matematico di lunghezza:
avrà lo stesso periodo di oscillazione del pendolo fisico considerato. Viene chiamata la quantità (1.7.29). lunghezza ridotta pendolo fisico. Di conseguenza, la lunghezza ridotta di un pendolo fisico è la lunghezza di un pendolo matematico il cui periodo di oscillazione è uguale al periodo di oscillazione di un dato pendolo fisico.
Un punto sulla retta che collega il punto di sospensione con il centro di inerzia, situato ad una distanza di una data lunghezza dall'asse di rotazione, si chiama centro altalena pendolo fisico. Secondo il teorema di Steiner, il momento di inerzia di un pendolo fisico è pari a:
dove I 0 è il momento di inerzia relativo al centro di inerzia. Sostituendo la (1.7.30) nella (1.7.29), otteniamo:
Di conseguenza la lunghezza ridotta è sempre maggiore della distanza tra il punto di sospensione e il centro di inerzia del pendolo, per cui il punto di sospensione e il centro di oscillazione si trovano da parti opposte del centro di inerzia.
1.7.4. Energia delle vibrazioni armoniche
Nella vibrazione armonica avviene una conversione reciproca periodica tra l'energia cinetica del corpo oscillante E k e l'energia potenziale E p causata dall'azione di una forza quasi elastica. Queste energie costituiscono l’energia totale E del sistema oscillatorio:
Scriviamo l'ultima espressione
Ma k = mω 2, quindi otteniamo un'espressione per l'energia totale del corpo oscillante
Pertanto, l'energia totale di una vibrazione armonica è costante e proporzionale al quadrato dell'ampiezza e al quadrato della frequenza circolare della vibrazione.
1.7.5. Oscillazioni smorzate .
Nello studio delle vibrazioni armoniche non sono state prese in considerazione le forze di attrito e di resistenza esistenti nei sistemi reali. L'azione di queste forze cambia significativamente la natura del movimento, l'oscillazione diventa sbiadimento.
Se nel sistema, oltre alla forza quasi elastica, sono presenti forze di resistenza del mezzo (forze di attrito), allora la seconda legge di Newton può essere scritta come segue:
dove r è il coefficiente di attrito che caratterizza le proprietà del mezzo di resistere al movimento. Sostituiamo la (1.7.34b) nella (1.7.34a):

Il grafico di questa funzione è mostrato in Fig. 1.7.5 con la curva continua 1 e la linea tratteggiata 2 mostra la variazione di ampiezza:
Con un attrito minimo, il periodo di oscillazione smorzata è vicino al periodo di oscillazione libera non smorzata (1.7.35.b)
Viene determinata la velocità di diminuzione dell'ampiezza delle oscillazioni coefficiente di attenuazione: maggiore è il β, più forte è l'effetto inibitorio del mezzo e più velocemente diminuisce l'ampiezza. In pratica, il grado di attenuazione viene spesso caratterizzato decremento logaritmico dello smorzamento, intendendo con ciò un valore pari al logaritmo naturale del rapporto tra due ampiezze di oscillazione successive separate da un intervallo di tempo pari al periodo di oscillazione:
![]() ;
;
Di conseguenza, il coefficiente di smorzamento e il decremento di smorzamento logaritmico sono legati da una relazione abbastanza semplice:
Con un forte smorzamento, la formula (1.7.37) mostra che il periodo di oscillazione è una quantità immaginaria. Il movimento in questo caso è già chiamato aperiodico. Il grafico del moto aperiodico è mostrato in Fig. 1.7.6. Vengono chiamate oscillazioni non smorzate e smorzate Proprio O gratuito. Sorgono come risultato dello spostamento iniziale o della velocità iniziale e si verificano in assenza di influenze esterne dovute all'energia inizialmente accumulata.
1.7.6. Vibrazioni forzate. Risonanza .
Costretto Le oscillazioni sono quelle che si verificano in un sistema con la partecipazione forza esterna, variando secondo una legge periodica.
Supponiamo che, oltre alla forza quasi elastica e alla forza di attrito, sul punto materiale agisca una forza motrice esterna
![]() ,
,
dove F 0 - ampiezza; ω - frequenza circolare delle oscillazioni della forza motrice. Creiamo un'equazione differenziale (seconda legge di Newton):
![]() ,
,
L'ampiezza della vibrazione forzata (1.7.39) è direttamente proporzionale all'ampiezza della forza motrice e dipende in modo complesso dal coefficiente di smorzamento del mezzo e dalle frequenze circolari della vibrazione naturale e forzata. Se per il sistema vengono forniti ω 0 e β, allora l'ampiezza delle oscillazioni forzate ha un valore massimo a una frequenza specifica della forza motrice, chiamata risonante.
Il fenomeno stesso - il raggiungimento dell'ampiezza massima per dati ω 0 e β - viene chiamato risonanza.
 |
| Riso. 1.7.7. Risonanza |
In assenza di resistenza, l'ampiezza delle oscillazioni forzate alla risonanza è infinitamente grande. In questo caso, da ω res =ω 0, cioè la risonanza in un sistema senza smorzamento si verifica quando la frequenza della forza motrice coincide con la frequenza delle oscillazioni naturali. Dipendenza grafica dell'ampiezza delle oscillazioni forzate dalla frequenza circolare della forza motrice a significati diversi il coefficiente di attenuazione è mostrato in Fig. 5.
La risonanza meccanica può essere sia benefica che dannosa. Gli effetti dannosi della risonanza sono dovuti principalmente alla distruzione che può causare. Quindi, nella tecnologia, tenendo conto delle varie vibrazioni, è necessario prevedere l'eventuale verificarsi di condizioni di risonanza, altrimenti potrebbero verificarsi distruzioni e disastri. I corpi di solito hanno diverse frequenze di vibrazione naturali e, di conseguenza, diverse frequenze di risonanza.
Se il coefficiente di attenuazione degli organi interni di una persona non fosse elevato, i fenomeni di risonanza che si sono verificati in questi organi sotto l'influenza di vibrazioni esterne o onde sonore potrebbero portare a conseguenze tragiche: rottura di organi, danni ai legamenti, ecc. Tuttavia, tali fenomeni non vengono praticamente osservati in condizioni di influenze esterne moderate, poiché il coefficiente di attenuazione dei sistemi biologici è piuttosto elevato. Tuttavia si verificano fenomeni di risonanza sotto l'azione di vibrazioni meccaniche esterne organi interni. Questo è apparentemente uno dei motivi dell'impatto negativo delle vibrazioni e delle vibrazioni infrasoniche sul corpo umano.
1.7.7. Autooscillazioni
Esistono anche sistemi oscillatori che regolano essi stessi il rifornimento periodico dell'energia sprecata e quindi possono oscillare a lungo.
Vengono chiamate oscillazioni non smorzate che esistono in qualsiasi sistema in assenza di un'influenza esterna variabile auto-oscillazioni, e i sistemi stessi - auto-oscillante.
L'ampiezza e la frequenza delle auto-oscillazioni dipendono dalle proprietà del sistema auto-oscillante stesso, a differenza delle oscillazioni forzate, non sono determinate da influenze esterne;
In molti casi, i sistemi autooscillanti possono essere rappresentati da tre elementi principali (Fig. 1.7.8): 1) il sistema oscillatorio stesso; 2) fonte di energia; 3) regolatore della fornitura di energia al sistema oscillatorio stesso. Sistema oscillatorio per canale feedback(Fig. 6) influenza il regolatore, informando il regolatore sullo stato di questo sistema.
Un classico esempio di sistema meccanico auto-oscillante è un orologio in cui un pendolo o bilanciere è un sistema oscillatorio, una molla o un peso sollevato è una fonte di energia e un'ancora è un regolatore del flusso di energia dalla fonte nel sistema oscillatorio.
Molti sistemi biologici (cuore, polmoni, ecc.) sono auto-oscillanti. Un tipico esempio di sistema autooscillante elettromagnetico sono i generatori di oscillazioni autooscillanti.
1.7.8. Somma di oscillazioni di una direzione
Considera la somma di due oscillazioni armoniche della stessa direzione e della stessa frequenza:
x 1 =a 1 cos(ω 0 t + α 1), x 2 =a 2 cos(ω 0 t + α 2).
Un'oscillazione armonica può essere specificata utilizzando un vettore, la cui lunghezza è uguale all'ampiezza delle oscillazioni, e la direzione forma un angolo con un determinato asse uguale alla fase iniziale delle oscillazioni. Se questo vettore ruota con velocità angolare ω 0, la sua proiezione sull'asse selezionato cambierà secondo una legge armonica. Sulla base di ciò, selezioneremo un determinato asse X e rappresenteremo le oscillazioni utilizzando i vettori a 1 e a 2 (Fig. 1.7.9).
Dalla Fig. 1.7.6 ne consegue che
![]() .
.
Gli schemi in cui le oscillazioni sono rappresentate graficamente come vettori su un piano sono chiamati diagrammi vettoriali.
Ne consegue dalla formula 1.7.40. Cosa succede se la differenza di fase di entrambe le oscillazioni è zero, l'ampiezza dell'oscillazione risultante è uguale alla somma delle ampiezze delle oscillazioni aggiunte. Se la differenza di fase delle oscillazioni aggiunte è uguale, allora l'ampiezza dell'oscillazione risultante è uguale a . Se le frequenze delle oscillazioni aggiunte non sono le stesse, i vettori corrispondenti a queste oscillazioni ruoteranno con a velocità diverse. In questo caso, il vettore risultante pulsa in grandezza e ruota a velocità variabile. Di conseguenza, il risultato dell'addizione non è un'oscillazione armonica, ma un processo oscillatorio complesso.
1.7.9. Batte
Consideriamo la somma di due oscillazioni armoniche della stessa direzione, leggermente diverse in frequenza. Lascia che la frequenza di uno di essi sia uguale a ω, e il secondo ω+∆ω e ∆ω<<ω. Положим, что амплитуды складываемых колебаний одинаковы и начальные фазы обоих колебаний равны нулю. Тогда уравнения колебаний запишутся следующим образом:
x 1 =a cos ωt, x 2 =a cos(ω+∆ω)t.
Sommando queste espressioni e utilizzando la formula per la somma dei coseni, otteniamo:
Le oscillazioni (1.7.41) possono essere considerate come un'oscillazione armonica con frequenza ω, la cui ampiezza varia secondo la legge. Questa funzione è periodica con una frequenza doppia della frequenza dell'espressione sotto il segno del modulo, cioè con frequenza ∆ω. Pertanto, l'ampiezza della frequenza di pulsazione, chiamata frequenza di battimento, è uguale alla differenza nelle frequenze delle oscillazioni aggiunte.
1.7.10. Aggiunta di oscillazioni reciprocamente perpendicolari (figure di Lissajous)
Se un punto materiale oscilla sia lungo l'asse x che lungo l'asse y, si sposterà lungo una determinata traiettoria curvilinea. Lasciamo che la frequenza di oscillazione sia la stessa e la fase iniziale della prima oscillazione uguale a zero, quindi scriviamo le equazioni di oscillazione nella forma:
L'equazione (1.7.43) è l'equazione di un'ellisse, i cui assi sono orientati arbitrariamente rispetto agli assi delle coordinate xey. L'orientamento dell'ellisse e la grandezza dei suoi semiassi dipendono dalle ampiezze aeb e dalla differenza di fase α. Consideriamo alcuni casi particolari:
(m=0, ±1, ±2, …). In questo caso, l'equazione ha la formaQuesta è l'equazione di un'ellisse, i cui assi coincidono con gli assi delle coordinate, e i suoi semiassi sono uguali alle ampiezze (Fig. 1.7.12). Se le ampiezze sono uguali, l'ellisse diventa un cerchio.
 |
| Fig.1.7.12 |
Se le frequenze delle oscillazioni reciprocamente perpendicolari differiscono di una piccola quantità ∆ω, possono essere considerate come oscillazioni della stessa frequenza, ma con una differenza di fase che cambia lentamente. In questo caso è possibile scrivere le equazioni delle vibrazioni
x=a cos ωt, y=b cos[ωt+(∆ωt+α)]
e l'espressione ∆ωt+α va considerata come una differenza di fase che cambia lentamente nel tempo secondo una legge lineare. Il movimento risultante in questo caso avviene lungo una curva che cambia lentamente, che successivamente assumerà una forma corrispondente a tutti i valori della differenza di fase da -π a +π.
Se le frequenze delle oscillazioni reciprocamente perpendicolari non sono le stesse, allora la traiettoria del movimento risultante ha la forma di curve piuttosto complesse chiamate Figure di Lissajous. Mettiamo ad esempio in relazione le frequenze delle oscillazioni aggiunte come 1 : 2 e differenza di fase π/2. Quindi le equazioni delle vibrazioni hanno la forma
x=a cosωt, y=b cos.
Durante il tempo in cui un punto riesce a spostarsi lungo l'asse x da una posizione estrema all'altra, lungo l'asse y, dopo aver lasciato la posizione zero, riesce a raggiungere una posizione estrema, poi un'altra e tornare. La forma della curva è mostrata in Fig. 1.7.13. La curva con lo stesso rapporto di frequenza, ma la differenza di fase pari a zero è mostrata in Fig. 1.7.14. Il rapporto tra le frequenze delle oscillazioni aggiunte è inverso al rapporto tra il numero di punti di intersezione delle figure di Lissajous con rette parallele agli assi coordinati. Di conseguenza, dall'apparizione delle figure di Lissajous, si può determinare il rapporto tra le frequenze delle oscillazioni aggiunte o la frequenza sconosciuta. Se una delle frequenze è nota.
 |
| Fig.1.7.13 |
 |
| Fig.1.7.14 |
Quanto più vicina all'unità è la frazione razionale che esprime il rapporto delle frequenze di oscillazione, tanto più complesse sono le figure di Lissajous risultanti.
1.7.11. Propagazione delle onde in un mezzo elastico
Se le vibrazioni delle sue particelle vengono eccitate in qualsiasi punto del mezzo elastico (solido, liquido o gassoso), allora, a causa dell'interazione tra le particelle, questa vibrazione si propagherà nel mezzo da particella a particella con una certa velocità v. si chiama il processo di propagazione delle vibrazioni nello spazio onda.
Le particelle del mezzo in cui si propaga l'onda non vengono trascinate nel moto traslatorio dall'onda ma oscillano solo attorno alle loro posizioni di equilibrio;
A seconda delle direzioni delle oscillazioni delle particelle rispetto alla direzione in cui si propaga l'onda, ci sono longitudinale e trasversale onde. In un'onda longitudinale, le particelle del mezzo oscillano lungo la propagazione dell'onda. In un'onda trasversale, le particelle del mezzo oscillano in direzioni perpendicolari alla direzione di propagazione delle onde. Le onde trasversali elastiche possono formarsi solo in un mezzo che presenta resistenza al taglio. Pertanto, nei mezzi liquidi e gassosi possono verificarsi solo onde longitudinali. In un mezzo solido possono verificarsi sia onde longitudinali che trasversali.
Nella fig. La Figura 1.7.12 mostra il movimento delle particelle quando un'onda trasversale si propaga in un mezzo. I numeri 1, 2, ecc. indicano le particelle in ritardo l'una rispetto all'altra di una distanza pari a (¼ υT), cioè la distanza percorsa dall'onda durante un quarto del periodo di oscillazioni compiute dalle particelle. Nell'istante assunto pari a zero, l'onda, propagandosi lungo l'asse da sinistra a destra, ha raggiunto la particella 1, a seguito della quale la particella ha iniziato a spostarsi verso l'alto dalla posizione di equilibrio, trascinando con sé le particelle successive. Dopo un quarto del periodo, la particella 1 raggiunge la posizione di equilibrio più alta, la particella 2. Dopo un altro quarto del periodo, la prima parte supererà la posizione di equilibrio, muovendosi nella direzione dall'alto verso il basso, la seconda particella raggiungerà la posizione di equilibrio più alta posizione, e la terza particella inizierà a muoversi verso l'alto dalla posizione di equilibrio. In un tempo pari a T, la prima particella completerà l'intero ciclo di oscillazione e si troverà nello stesso stato di movimento del momento iniziale. L'onda al tempo T, dopo aver percorso il percorso (υT), raggiungerà la particella 5.
Nella fig. La Figura 1.7.13 mostra il movimento delle particelle quando un'onda longitudinale si propaga in un mezzo. Tutte le argomentazioni riguardanti il comportamento delle particelle in un'onda trasversale possono essere applicate a questo caso sostituendo gli spostamenti verso l'alto e verso il basso con spostamenti a destra e a sinistra.
Dalla figura si vede che quando un'onda longitudinale si propaga in un mezzo si creano condensazioni e rarefazioni alternate di particelle (i luoghi di condensazione sono delineati in figura con linee tratteggiate), muovendosi nella direzione di propagazione dell'onda con una velocità v.
 |
| Riso. 1.7.15 |
 |
| Riso. 1.7.16 |
Nella fig. 1.7.15 e 1.7.16 mostrano le vibrazioni di particelle le cui posizioni ed equilibri giacciono sull'asse X. In realtà non vibrano solo le particelle poste lungo l'asse X, ma un insieme di particelle contenute in un certo volume. Propagandosi dalle sorgenti delle oscillazioni, il processo ondoso copre sempre più nuove parti dello spazio, la localizzazione geometrica dei punti a cui giungono le oscillazioni al tempo t è chiamata fronte d'onda(o fronte d'onda). Il fronte d'onda è la superficie che separa la parte di spazio già interessata dal processo ondoso dalla regione in cui non si sono ancora manifestate oscillazioni.
Viene chiamata la posizione geometrica dei punti che oscillano nella stessa fase superficie dell'onda . La superficie dell'onda può essere tracciata attraverso qualsiasi punto dello spazio coperto dal processo ondoso. Di conseguenza, esiste un numero infinito di superfici d'onda, mentre esiste un solo fronte d'onda in ogni momento del tempo. Le superfici d'onda rimangono immobili (passano attraverso le posizioni di equilibrio di particelle che oscillano nella stessa fase ). Il fronte d'onda si muove continuamente.
Le superfici ondulate possono avere qualsiasi forma. Nei casi più semplici hanno la forma di un piano o di una sfera. Di conseguenza, l'onda in questi casi è chiamata piana o sferica. In un'onda piana, le superfici dell'onda sono un insieme di piani paralleli tra loro, in un'onda sferica - un insieme di sfere concentriche.
 |
| Riso. 1.7.17 |
Lasciamo che un'onda piana si propaghi lungo l'asse X. Quindi tutti i punti della sfera le cui posizioni ed equilibri hanno le stesse coordinate X(ma la differenza nei valori delle coordinate sì E z), oscillare nella stessa fase.
Nella fig. 1.7.17 mostra una curva che fornisce uno spostamento ξ dalla posizione di equilibrio di punti con diverso X ad un certo punto nel tempo. Questo disegno non dovrebbe essere percepito come un'immagine visibile di un'onda. La figura mostra un grafico delle funzioni ξ (x,t) per alcuni fisso punto nel tempo T. Tale grafico può essere costruito sia per onde longitudinali che trasversali.
La distanza λ sulla quale un'onda si propaga brevemente in un tempo pari al periodo di oscillazione delle particelle del mezzo è detta lunghezza d'onda. E' ovvio
dove υ è la velocità dell'onda, T è il periodo di oscillazione. La lunghezza d'onda può anche essere definita come la distanza tra i punti più vicini del mezzo oscillante con una differenza di fase pari a 2π (vedi Fig. 1.7.14)
Sostituendo T in relazione alla (1.7.45) tramite 1/ν (ν è la frequenza di oscillazione), otteniamo
A questa formula si può arrivare anche dalle seguenti considerazioni. In un secondo la sorgente d'onda compie ν oscillazioni, generando nel mezzo ad ogni oscillazione una “cresta” ed una “fossa” dell'onda. Nel momento in cui la sorgente completa l'oscillazione ν -esima, la prima “dorsale” avrà il tempo di percorrere una distanza υ. Di conseguenza, ν delle “creste” e dei “cavi” dell'onda deve rientrare nella lunghezza υ.
1.7.12. Equazione delle onde piane
L'equazione d'onda è un'espressione che fornisce lo spostamento di una particella oscillante in funzione delle sue coordinate x, y, z e tempo T :
ξ = ξ (x, y, z; t)
(ovvero le coordinate della posizione di equilibrio della particella). Questa funzione deve essere periodica rispetto al tempo T e relativo alle coordinate x, y, z. . La periodicità nel tempo deriva dal fatto che i punti sono distanti l'uno dall'altro λ , oscillare allo stesso modo.
Troviamo il tipo di funzione ξ nel caso di un'onda piana, presupponendo che le oscillazioni siano di natura armonica. Per semplificare, indirizziamo gli assi delle coordinate in modo che l'asse X coincideva con la direzione di propagazione delle onde. Quindi le superfici delle onde saranno perpendicolari all'asse X e, poiché tutti i punti della superficie dell'onda vibrano allo stesso modo, lo spostamento ξ dipenderà solo da X E T:
ξ = ξ (x,t) .
 |
| Fig.1.7.18 |
Consideriamo le vibrazioni dei punti che giacciono nel piano X = 0 (Fig. 1.7.18), hanno la forma
Troviamo il tipo di oscillazione dei punti nel piano corrispondenti ad un valore arbitrario X . Per percorrere un percorso dall'aereo X=0 per raggiungere questo piano l'onda impiega tempo( υ - velocità di propagazione delle onde). Di conseguenza, le vibrazioni delle particelle che giacciono nel piano X , ritarderà nel tempo di τ dalle vibrazioni delle particelle nel piano X = 0 , cioè. sembrerà
COSÌ, Equazione delle onde piane(longitudinale e trasversale), che si estende nella direzione dell'asse X , assomiglia a questo:
Questa espressione definisce la relazione tra il tempo t e quel posto X , in cui la fase ha un valore fisso. Il valore dx/dt risultante fornisce la velocità con cui si muove un dato valore di fase. Differenziando l'espressione (1.7.48), otteniamo
Equazione di un'onda che si propaga nella direzione decrescente X :
Nel derivare la formula (1.7.53), abbiamo assunto che l'ampiezza delle oscillazioni non dipenda da X . Per un'onda piana, ciò si osserva nel caso in cui l'energia dell'onda non viene assorbita dal mezzo. Quando si propaga in un mezzo che assorbe energia, l'intensità dell'onda diminuisce gradualmente con la distanza dalla fonte delle oscillazioni: si osserva un'attenuazione dell'onda. L’esperienza dimostra che in un mezzo omogeneo tale attenuazione avviene secondo una legge esponenziale:
![]()
Rispettivamente equazione delle onde piane, tenendo conto dell'attenuazione, ha la seguente forma:
| (1.7.54) |
(a 0 - ampiezza nei punti del piano x = 0).