Teorijska mehanika za čajnike kinematike. Statički - odjeljak teorijske mehanike. Šta je pokret
Kinematika
Kinematički materijalna tačka
Određivanje brzine i ubrzanja tačke prema navedenim jednadžbama njegovog pokreta
S obzirom: pokazivačke jednadžbe: x \u003d 12 grijeh (πt / 6), cm; y \u003d. 6 cos 2 (πt / 6), cm.
Postavite prikaz svoje putanje i za vrijeme T \u003d 1 S. Pronađite položaj tačke na putanju, njegovu brzinu, kompletnu, tangentnu i normalno ubrzanje, kao i radijus zakrivljenosti putanje.
Pokretanje i rotacijsko firm

S obzirom:
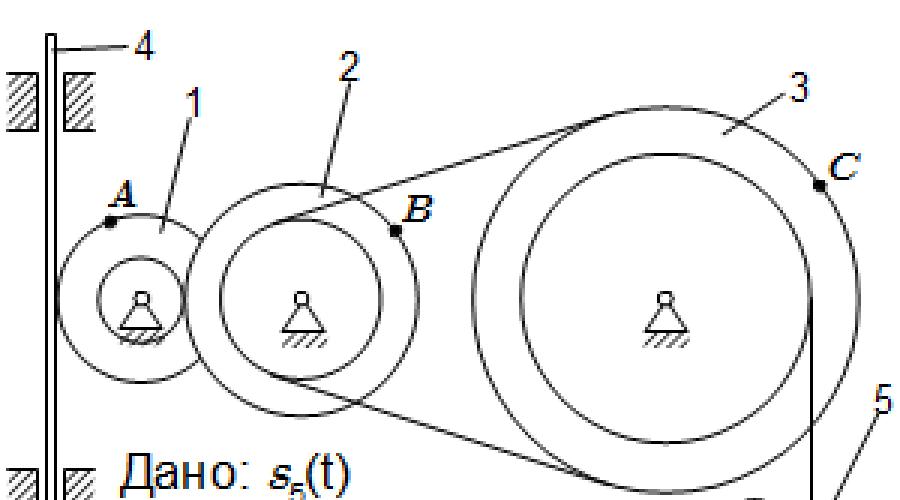
t \u003d 2 s; R 1 \u003d 2 cm, r 1 \u003d 4 cm; R 2 \u003d 6 cm, R 2 \u003d 8 cm; R 3 \u003d 12 cm, R 3 \u003d 16 cm; S 5 \u003d T 3 - 6t (cm).
Odredite u vrijeme T \u003d 2 brzine bodova A, C; Kutno ubrzanje kotača 3; Point ubrzanja B i ubrzanje stalak 4.
Kinematička analiza ravnog mehanizma

S obzirom:
R 1, R 2, L, AB, ω 1.
Pronađi: ω 2.

Ravni mehanizam sastoji se od šipki 1, 2, 3, 4 i klizača E. Šipke su povezane cilindričnim šarkama. Point D nalazi se u sredini AB štapova.
Danchied: ω 1, ε 1.
Pronađi: brzina v a, v b, v d i v e; Kutna brzina ω 2, ω 3 i ω 4; Ubrzanje a b; Kutno ubrzanje ε AB AB veza; Položaji trenutnih brzih centara P 2 i P 3 veze 2 i 3 mehanizme.
Određivanje apsolutne brzine i apsolutnog ubrzanja tačke

Pravokutna ploča okreće se oko stacionarne osi po zakonu φ \u003d 6 t 2 - 3 t 3 . Pozitivan referentni smjer kuta φ prikazan je u crtežima arc strelice. Oo rotacijska osovina 1 Leži u ravnini tanjira (tanjir se okreće u prostoru).
Duž ploče duž direktnog BD-a, točka M se kreće. Zakon njegovog relativnog pokreta je dat, I.E. Zavisnost S \u003d AM \u003d 40 (T - 2 T 3) - 40 (S - u centimetrima, T - u sekundi). Udaljenost B \u003d. 20 cm. Na slici je tačka M prikazana u položaju u kojoj je S \u003d AM > 0 (na S.< 0 tačka m je s druge strane tačke A).
Pronađite apsolutnu brzinu i apsolutno ubrzanje točke m u vrijeme t 1 \u003d 1 s.
Dinamika
Integriranje diferencijalnih jednadžbi kretanja materijalne točke pod djelovanjem varijabilnih sila
Težak D vaganje m, primio početnu brzinu v 0 na točki A, pomiče se u zakrivljenoj ABC cijevi koja se nalazi u vertikalnoj ravnini. Na odjeljku AB čija L, stalna sila T (njegov smjer prikazan je na slici) i čvrstoću srednjeg otpora (modul ove sile R \u003d μV 2, vektor R je režiran nasuprot brzina V tereta).
Teret, koji je završio kretanje na AB presjeku, na točki B cijevi, bez promjene vrijednosti modula njegove brzine, ide u odjeljak BC. Promenljiva sila F radi na području BC na robi, projekcija f x koja je postavljena na X osi X.
S obzirom na teretni materijal, pronađite zakon njegovog pokreta na placu BC, I.E. x \u003d f (t), gdje je x \u003d bd. Prizemno trenje o cijevi za zanemarivanje.

Preuzimanje zadatka rješenja
Teorema o promjeni u kinetičkoj energiji mehaničkog sistema
Mehanički sustav sastoji se od robe 1 i 2, cilindričnog klizanja 3, dvostepene remenice 4 i 5. Tijelo sistema povezan je na nitima rane na remenicama; Parcele niti su paralelne sa odgovarajućim avionima. Klizalište (čvrsti homogeni cilindar) kotrlja se uz avion za potporu bez klizanja. Polumjer remenica 4 i 5 jednaki su R 4 \u003d 0,3 m, r 4 \u003d 0,1 m, r 5 \u003d 0,2 m, r 5 \u003d 0,1 m. Masa svake remenice smatra se ravnomjerno raspoređenim vanjskim štapom. Podrška aviona tereta 1 i 2 gruba, koeficijent kliznog trenja za svaki teret f \u003d 0,1.
Pod djelovanjem Force F, modul od kojeg se mijenja prema Zakonu F \u003d F (s), gdje s pomicanjem tačke svoje primjene, sustav dolazi u pokret od ostatka ostatka ostatka. Kada sustav za remenice 5 djeluje čvrstoće otpornosti, u kojem je u odnosu na osovinu rotacije konstantna i jednaka M 5.
Odredite vrijednost kutne brzine remenice 4 u to vrijeme kada će pokret s tačke pop aplikacije postati jednak s 1 \u003d 1,2 m. 
Preuzimanje zadatka rješenja
Primjena opće dinamike jednadžbe na studiju mehaničkih sustava
Za mehanički sistem za određivanje linearnog ubrzanja A 1. Pretpostavlja se da se blokovi i valjci mase distribuiraju kroz vanjski polumjer. Kablovi i pojasevi smatraju se belkovnim i neograničenim; Slock nedostaje. Trenje kotrljanja i trenja zanemareno. 
Preuzimanje zadatka rješenja
Upotreba načela dalamber za utvrđivanje reakcija propagiranog nosača tijela
Vertikalno vratilo AK, ravnomjerno okretanje s kutnom brzinom ω \u003d 10 c -1, fiksiran je od špijuna u točki A i cilindrični ležaj na tački D.
Belless štap 1 l 1 \u003d 0,3 m kruto je do osovine, na slobodnom kraju, čiji je masa m 1 \u003d 4 kg, a homogena šipka 2 l 2 \u003d 0,6 m dugačka, ima masu m 2 \u003d 8 kg. Obje šipke leže u jednoj vertikalnoj ravnini. Točke pričvršćivanja šipki do osovine, kao i uglovi α i β označeni su u tablici. Dimenzije AB \u003d BD \u003d DE \u003d EK \u003d B, gdje je b \u003d 0,4 m. Teret koji će uzeti za materijalnu točku.
Zanemarivanje mase osovine, odredite reakcije sfalera i ležaja.

Kinematics točka.
1. Predmet teorijske mehanike. Osnovne apstrakcije.
Teorijska mehanika- Ovo je nauka u kojoj se studiraju opći zakoni mehaničkog pokreta i mehaničke interakcije materijalnih tijela
Mehanički pokret Naziva se kretanjem tijela u odnosu na drugo tijelo koje se događa u prostoru i vremenu.
Mehanička interakcija Naziva se takvom interakcijom materijalnih tijela, koja mijenja prirodu njihovog mehaničkog pokreta.
Statika - Ovo je odjeljak teorijske mehanike, koji studira metode za transformaciju sistema čvrstoće na ekvivalentne sustave i uspostavlja ravnotežne uvjete pričvršćene na čvrsto tijelo.
Kinematika - ovaj dio teorijske mehanike u kojem se proučava kretanje materijalnih tijela u prostoru sa geometrijskog stanovišta, bez obzira na sile koje djeluju na njih.
Dinamika - Ovo je dio mehaničara u kojem se kretanje materijalnih tijela u prostoru proučava ovisno o silama koje djeluju na njih.
Objekti studije u teorijskoj mehanici:
materijalna tačka,
materijalni sistem tačaka
Apsolutno čvrsto tijelo.
Apsolutni prostor i apsolutni vremenski neovisni jedan od drugog. Apsolutni prostor - trodimenzionalni, homogeni, stacionarni euklidski prostor. Apsolutno vrijeme - Kontinuirano teče iz prošlosti u budućnost, ravnomjerno je, jednako u svim točkama prostora i ne ovisi o kretanju materije.
2. Predmet kinematike.
Kinematika - ovaj dio mehaničara u kojem se studiraju geometrijska svojstva kretanja tijela bez uzimanja u obzir njihovu inerciju (tj. Masu) i snage koje djeluju na njih
Da biste odredili položaj pokretnog tijela (ili točke) s tim tijelom, u odnosu na koji se kretanje ovog tijela proučava, čvrsto, veže neki koordinatni sustav koji se oblivu zajedno sa tijelom referentni sistem.
Glavni zadatak kinematike To je da, znajući zakon pokreta ovog tijela (poenta) da utvrdi sve kinematičke vrijednosti koje karakterišu njeno kretanje (brzina i ubrzanje).
3. Načini postavljanja point pokreta
· Prirodni način
Trebalo bi biti poznato:
Tkanita za pokretanje puta;
Početak i smjer referentne;
Zakon kretanja tačke prema datu putanju u obliku (1.1)
· Koordinata metoda
Jednadžbe (1.2) - Jednadžbe kretanja M.
Jednadžba putanje tačke M može se dobiti isključivanjem vremenskog parametra « t. » Iz jednadžbe (1.2)
· Vector Fashion
|
|
(1.3) Komunikacija između koordinatnih i vektorskih metoda točke kretanja tačke
|

Komunikacija između koordinatnog i prirodnog načina ciljanog prometa
Odredite put tačke, eliminirajući vrijeme iz jednadžbi (1.2);
-- pronađite zakon kretanja tačke duž putanje (koristite izraz za diferencijal ARC-a)
Nakon integracije, dobijamo zakon kretanja pojmova prema određenoj putanju:
Odnos između koordinatnih i vektorskih metoda kretanja točke određuje se jednadžbom (1.4)
4. Određivanje brzine tačke u vektorskoj metodi postavljanja pokreta.
Neka u trenutku vremenat.položaj točke određuje polumjerski vektor i u trenutku vremenat. 1
- polumjer-vektor, zatim s vremenom ![]() point će se preseliti.
point će se preseliti.
|
|
prosječna točka točke, režirani vektor kao i vektor
|

 (1.5)
(1.5)
Tačka tačke u određenom vremenu
Da biste u ovom trenutku dobili brzinu točke, potrebno je napraviti ograničenje
 (1.6)
(1.6)
(1.7)
Trenutno vektor brzine točke To je jednak prvom derivatu radijus-vektora na vrijeme i namijenjen je tangentima na putanju u ovom trenutku.
(jedinica¾ m / s, km / h)
Vektor srednjeg ubrzanja ima isti smjer kao i vektorΔ v. To je, usmjereno na napredak putanje.
Vektorski ubrzanje točka u određenom vremenu To je jednak prvom derivatu vektora vezolu ili drugi izvedenik radijus-vektorskog točka na vrijeme.
(Merna jedinica -)
Kako je vektor u odnosu na tačku putanju?
Sa pravolinijskim pokretom vektor je usmjeren prema direktnom, što pomiče poentu. Ako je putanje puta ravna krivulja, a zatim brzina ubrzanja, kao i vektor sredine u ravnini ove krivulje i usmjeren je prema njenoj konkavnosti. Ako putanje nije ravna krivulja, vektor CP-a bit će usmjeren na napredak putanje i u avionu će u avionu prolaziti kroz tangent u tangetu u tačkiM. i ravno, paralelna tangenta u sljedećem trenutkuM 1. . U Ograničite kada je poentaM 1. nastoji M. Ovaj avion zauzima položaj takozvanog dodirivanja. Stoga, u općem slučaju, vektor ubrzanja leži u avionu sa dodir i usmjerava se prema depozitu krivulje.
Opće teoremi govornika sistema tijela. Teoreme o kretanju centra mase, o promjeni količine kretanja, o promjeni glavne tačke količine kretanja, o promjeni kinetičke energije. Principi Dalamberta i mogućih pokreta. Opća jednadžba govornika. Lagrange jednadžbe.
SadržajPosao koji moć čini jednak je skalarnom proizvodu vektora snage i beskonačno malog kretanja tačke njegove primjene:
,
To jest, proizvod modula f i DS vektora na kosinu u kutu između njih.
Radite na tome da je trenutak snage jednak je skalarnom proizvodu vektora zakretnog momenta i beskrajno mali kut rotacije:
.
Princip Dalamber
Suština principa Dalambera je zadatak da govornici smanji statičke zadatke. Za to se pretpostavlja (ili je poznato unaprijed) da tijelo sistema ima određene (ugasne) ubrzanja. Next, inercija se uvode i (ili) trenuci inercijskih snaga, koji su jednaki u veličini i obrnuto u pravcu snaga i trenutaka sila, koje bi, prema zakonima mehanike, stvorile određene ubrke ili Kutni ubrke
Razmotrite primjer. Put tijela počini prelazni pokret i vanjske sile djeluju na njemu. Zatim pretpostavljamo da ove snage stvaraju ubrzanje centra masovnog sistema. Prema teoriji o kretanju centra mase, središte mase tijela imalo bi isto ubrzanje, ako je snaga operirana na tijelu. Dalje, uvodimo snagu inercije:
.
Nakon toga, zadatak govornika:
.
;
.
Za rotacijsko kretanje dolazi na isti način. Neka se tijelo okreće oko osi z i postoje vanjski trenuci m e zk za to. Pretpostavljamo da ove trenutke stvaraju kutno ubrzanje ε z. Dalje, uvodimo trenutak inercijskih snaga M i \u003d - J Z Ε z. Nakon toga, zadatak govornika:
.
Pretvara se u zadatak statičkog:
;
.
Princip mogućih pokreta
Princip mogućih pokreta koristi se za rješavanje zadataka statike. U nekim zadacima daje kraće rešenje nego izvlačenje jednadžbi jednadžbi. To se posebno odnosi na sustave s priključcima (na primjer, tijela povezana nitima i blokovima) koji se sastoje od mnogih tijela.
Princip mogućih pokreta.
Za ravnotežu mehaničkog sistema s idealnim obveznicama potrebno je i dovoljno je da zbroj elementarnog rada svih aktivnih snaga koji djeluju na njemu s bilo kojim mogućim pokretom sustava bio je nula.
Moguće kretanje sistema - Ovo je mali pokret u kojem se veze nametnute sistemom ne prekršene.
Idealne veze - To su veze koje ne čine posao prilikom pomicanja sistema. Preciznije, količina radova izvedenih samim vezama kada se sistem kreće je nula.
Opća jednadžba govornika (princip Dalamber - Lagrange)
Princip Dalamber - Lagrange je udruženje principa Dalamberta sa načelom mogućih pokreta. To jest, prilikom rješavanja problema dinamike uvodimo inerske snage i smanjujemo zadatak statike koje rješavamo uz pomoć načela mogućih pokreta.
Princip Dalamber - Lagrange.
Prilikom premještanja mehaničkih sustava sa idealnim vezama u svakom trenutku, zbroj elementarnog rada svih priloženih aktivnih snaga i sve inercijalne sile na bilo kojem mogućem pokretu sistema je nula:
.
Ova jednadžba se zove ukupna jednadžba govornika.
Lagrange jednadžbe
Generalizovane koordinate Q. 1, q 2, ..., q n - Ovo je kombinacija n vrijednosti koje nedvosmisleno određuju položaj sistema.
Broj generaliziranih koordinata n podudaraju se s brojem stupnjeva slobode sistema.
Generalizirane brzine - Oni su izvedeni iz generaliziranih koordinata vremena t.
Općenito sile Q. 1, q 2, ..., q n
.
Razmotrite moguće kretanje sustava u kojem će koordinata Q k dobiti pokret Δq k. Preostale koordinate ostaju nepromijenjene. Neka je δa k posao koji izvode vanjskim silama s takvim potezom. Onda
ΔA k \u003d q k Δq k, ili
.
Ako se, sa mogućim kretanjem sustava mijenjaju sve koordinate, posao koji izvode vanjskim silama s takvim potezom ima obrazac:
ΔA \u003d Q. 1 ΔQ 1 + q 2 Δq 2 + ... + q n δq n.
Tada su generalizirane snage djelomičnih derivata iz rada pokreta:
.
Za potencijalne snage sa potencijalom π,
.
Lagrange jednadžbe - Ovo su jednadžbe mehaničkog sistema u generaliziranim koordinatama:
Ovdje je t kinetička energija. To je funkcija generaliziranih koordinata, brzine i, možda, vremena. Stoga je njen privatni derivat funkcionirao i generalizirane koordinate, brzine i vremena. Zatim je potrebno uzeti u obzir da su koordinate i brzine funkcije vremena. Stoga, da biste pronašli potpuni derivat na vrijeme, morate primijeniti pravilo diferencijacije složene funkcije:
.
Reference:
S. M. Targ, kratak tok teorijske mehanike, "Viša škola", 2010.
Tečaj se smatra: Kinematika točke i čvrstog tijela (i sa različitih gledišta, predlaže se razmatrati problem orijentacije čvrstog), klasičnih zadataka dinamike mehaničkih sistema i dinamike čvrstog tijela, Elementi nebeske mehanike, kretanje varijabilnih sustava sastava, teorija udara, diferencijalne jednadžbe analitičke dinamike.
Svi tradicionalni dijelovi teorijske mehanike su predstavljeni, ali posebna se pažnja posvećuje razmatranju najiorstvo i vrijedniju za teoriju i primjene dinamike i metoda analitičke mehanike; Statika se proučavaju kao odjeljak govornika, a u odjeljku Kinematika, pojmovi i matematički aparat se detaljno uvode.
Informativni resursi
Gantmakher F.r. Predavanja o analitičkoj mehanici. - 3. ed. - M.: Fizmatlit, 2001.
Zhuravleov V.F. Osnove teorijske mehanike. - Drugo ed. - M.: Fizmatlit, 2001; 3. ed. - M.: Fizmatlit, 2008.
Markeev a.p. Teorijska mehanika. - Moskva - Izhevsk: Nic "Redovna i haotična dinamika", 2007.
Zahtjevi
Kurs je osmišljen za studente koji vlade analitičke geometrije i linearne algebre u opsegu prvog kursa tehničkog univerziteta.
Program kursa
1. Kinematički bodovi
1.1. Kinematički zadaci. Decartrova koordinatni sistem. Raspadanje vektora ortonormalnom osnovom. Radius vektor i koordinate točke. Brzina i ubrzanja. Putanje kretanja.
1.2. Prirodni okidač. Dekompozicija brzine i ubrzanja u osi prirodnom trostrukom (guigens teorem).
1.3. Zakrivljene koordinate bodova, primjeri: polarni, cilindrični i sferni koordinatni sustavi. Komponente i projekcije ubrzanja na osovini koordinatnog sustava za krivine.
2. Načini postavljanja orijentacije čvrstog tijela
2.1. Čvrsta. Fiksni i obvezujući koordinatni sistem.
2.2. Ortogonalne matrice i njihova svojstva. EULER TEOREM o završnom prevodu.
2.3. Aktivno i pasivno gledište na ortogonalnu transformaciju. Dodavanje okreta.
2.4. Uglovi konačne rotacije: uglovi Eulera i "aviona" uglova. Izraz ortogonalne matrice kroz uglove konačne rotacije.
3. Prostorno kretanje čvrstog
3.1. Zaštitni i rotacijski kretanje čvrstog tijela. Ugaona brzina i kutno ubrzanje.
3.2. Distribucija brzina (EULER Formula) i ubrzanja (rivalna formula) čvrstih tačkica.
3.3. Kinematski invarijanti. Kinematski vijak. Instant vijčana osovina.
4. Ravni paralelni pokret
4.1. Koncept pokreta ravnine - paralelnog tijela. Ugaona brzina i kutno ubrzanje u slučaju avion-paralelnog pokreta. Instant brzi centar.
5. Složeno kretanje tačke i čvrstog tijela
5.1. Fiksni i pokretni koordinatni sistem. Apsolutni, relativni i prijenosni pokret za točku.
5.2. Teorema o dodavanju brzine sa složenim kretanjem tačke, relativne i prenosive brzine točke. Coriolis teorema o dodavanju ubrzanja sa složenim kretanjem tačke, relativne, prenosive i Coriolis ubrzanje ubrzanju.
5.3. Apsolutna, relativna i prenosiva ugaona brzina i kutno ubrzanje tijela.
6. Kretanje krute sa fiksnom tačkom (kvarcijski prezentacija)
6.1. Koncept složenih i hipercomplexa brojeva. Algebra kvaternije. Quaternion rad. Kod i obrnuto quaternion, norma i modul.
6.2. Trigonometrijski prikaz pojedinačnog kvarca. Quaterion način za postavljanje okretanja tijela. EULER TEOREM o završnom prevodu.
6.3. Komunikacija između kvarcijskih komponenti u različitim osnovama. Dodavanje okreta. Parametri Rodriga Hamilton.
7. Ispitni rad
8. Osnovni pojmovi dinamike.
8.1 Puls, trenutak impulsa (kinetički trenutak), kinetička energija.
8.2 Snaga sila, radni napor, potencijal i puna energija.
8.3 Masovni centar (inercijski) sistem. Trenutak inercije sistema u odnosu na os.
8.4 trenuci inercije u odnosu na paralelne osi; Guiggens-Steiner Theorem.
8.5 Tenzorska i elipsojna inercija. Glavne osi inercije. Svojstva aksijalnih trenutaka inercija.
8.6 Izračun trenutka impulsa i kinetičke energije tijela s inercijskim tenzorom.
9. Glavni teoreme govornika u inercijalnim i ne-inercijalnim referentnim sistemima.
9.1 Teorema o promjeni u sistemu impuls u inerciji referentni sustav. Teorema o kretanju centra mase.
9.2 Teorema o promjeni trenutka pulsa sistema u inercijalnom referentnom sustavu.
9.3 Teorema o promjeni u kinetičkoj energiji sistema u inercijalnom referentnom sistemu.
9.4 Potencijalne, žiroskopske i disipativne snage.
9.5 Glavni teoremi govornika u ne-inercijalnim referentnim sistemima.
10. Kretanje čvrstog tijela sa fiksnom točkom inercijom.
10.1 Dinamične eulerske jednadžbe.
10.2 Slučaj EULER-a, prvi integrali dinamičkih jednadžbi; Trajna rotacija.
10.3 Tumačenja Ponaso i McKoull.
10.4 Redovni precizni u slučaju dinamične simetrije tijela.
11. Kretanje teškog čvrstog tijela sa fiksnom točkom.
11.1 Općenito postavljanje problema kretanja teške čvrstog kruga.
Fiksna tačka. Dinamične eulerske jednadžbe i njihovi prvi integrali.
11.2 Kvalitativna analiza čvrstog pokreta u slučaju Lagrangea.
11.3 Prisilno redovno precizno dinamički simetrično čvrsto tijelo.
11.4 Osnovna ciroskopija formula.
11.5 Koncept osnovne teorije žiroskopa.
12. Point dinamika u centralnom polju.
12.1 Bina jednadžba.
12.2 Orbita jednadžba. Kepler zakoni.
12.3 Zadatak rasipanja.
12.4 zadatak dva tel. Jednadžbe pokreta. Integralni kvadratni, integralni energiju, lapurovni integral.
13. Dinamika varijabilnih sustava sastava.
13.1 Osnovni pojmovi i teoreme o promjeni osnovnih dinamičkih vrijednosti u sustavima varijabilnih kompozicija.
13.2 Kretanje materijalne varijabilne mase.
13.3 Jednadžbe kretanja tijela varijabilnog kompozicije.
14. Teorija impulsivnih pokreta.
14.1 Osnovni pojmovi i aksiomi impulsivnih pokreta.
14.2 Teoreme o promjeni u osnovnim dinamičkim vrijednostima u impulzivnom pokretu.
14.3 Impulzivno pokretanje firmvera.
14.4 Sudar dva solidna tijela.
14.5 Teoreme Carna.
15. Ispitivanje
Rezultati učenja
Kao rezultat razvoja discipline, student mora:
- Znajte:
- glavni pojmovi i teoreme mehanike i metode proučavanja kretanja mehaničkih sistema koji proizlaze iz njih;
- Moći:
- pravilno formulisati probleme u pogledu teorijske mehanike;
- razviti mehaničke i matematičke modele, adekvatno odražavajući osnovna svojstva pojava koji se razmatraju;
- primjena znanja stečena za rješavanje odgovarajućih određenih zadataka;
- Vlastiti:
- vještine za rješavanje klasičnih problema teorijske mehanike i matematike;
- vještine za proučavanje problema mehanike i izgradnje mehaničkih i matematičkih modela koji adekvatno opisuju različite mehaničke pojave;
- vještine praktične upotrebe metoda i principa teorijske mehanike u rješavanju problema: Izračun snage, određivanje kinematskih karakteristika tijela s različitim načinima za postavljanje pokreta, određivanje zakona o prijedlogu materijalnih tijela i mehaničkih sustava u okviru djelovanja snage;
- vještine samostalno magistriraju nove informacije u procesu industrijske i naučne aktivnosti, koristeći modernu edukativnu i informacijsku tehnologiju;
U okviru bilo kojeg tečaja obuke, studija fizike započinje mehanikom. Nije sa teorijskom, a ne primijenjenim i ne računanjem, već sa starim dobrom klasičnom mehanikom. Ova mehanika se naziva i Newton mehaničari. Prema legendi, naučnik je hodao po vrtu, vidio je da jabuka padne, i to je takva pojava gurnula u otvaranje svijeta globalnog. Naravno, zakon je uvijek postojao, a Newton mu je samo dao obrazac razumljive forme, ali njegova zasluga je neprocjenjiva. U ovom članku nećemo slikati zakone Newtonoian Mechanics u najoblaženijijim, ali navesti osnove, osnovna znanja, definicije i formule koje uvijek mogu igrati na vašoj ruci.
Mehanika - Odjeljak fizike, nauka koja proučava kretanje materijalnih tijela i interakcije između njih.
Sama riječ ima grčko porijeklo i prevodi kao "Mašine za izgradnju umjetnosti". Ali pre izgradnje automobila, još uvijek volimo za mjesec, pa idemo u korake naših predaka, a mi ćemo proučavati kretanje kamenja bačenih pod ugao do horizonta, a jabuke koje padaju na glavu iz visine H.

Zašto studija fizike započinje mehanikom? Jer je potpuno prirodno, a ne iz termodinamičke ravnoteže za pokretanje?!
Mehanika su jedna od najstarijih nauka, a povijesno učenje fizike započelo je osnovama mehanike. Smješten u okvir vremena i prostora, ljudi, u stvari nisu mogli započeti sa nečim drugim, sa svom željom. Pokretna tijela - prvo što obraćamo vašu pažnju.
Šta je kretanje?
Mehaničko kretanje je promjena položaja tijela u prostoru u odnosu na jedan s vremenom međusobno.
Nakon ove definicije u potpunosti prirodno dolazimo na koncept referentnog sustava. Promjena položaja tijela u prostoru u odnosu na međusobnu. Ključne riječi Ovdje: u odnosu jedni drugima . Napokon, putnik u automobilu pomiče relativno stajaći na stranu osobe na određenoj brzini, a počiva na svom susjedu na sjedištu u blizini i kreće se s nekim drugim brzinama u odnosu na putnika u automobilu koji ih prevlači.

Zato, kako bi se normalno izmjerili parametri pokretnih predmeta i ne zbunjuju se, trebamo referentni sustav je kruto povezani odbrojavanje, koordinatni sistem i sat. Na primjer, zemlja se kreće oko sunca u referentnom sustavu centrizovanog helija. U skoro svim njenim mjerenjima trošimo u geocentričnom referentnom sistemu koji se odnosi na zemlju. Zemlja je referentno tijelo u odnosu na koji se automobili kreću, avioni, ljudi, životinje.

Mehanika, poput nauke, ima svoj zadatak. Zadatak mehanike - u bilo kojem trenutku da znate položaj tijela u prostoru. Drugim riječima, mehaničar gradi matematički opis pokreta i nalazi odnos između fizičkih količina, što ga karakterizira.
Da bismo se kretali dalje, trebat će nam koncept " materijalna tačka ". Kažu da je fizika - tačna nauka, ali fizičari znaju koliko aproksimacija i pretpostavki moraju učiniti za koordinaciju ove vrlo preciznosti. Niko nikada nije vidio materijalnu točku i nije mirisao savršenim plinom, već su! Oni su samo mnogo lakše živjeti.
Materijalna točka je tijelo, veličine i oblik u kojem se u kontekstu ovog zadatka mogu zanemariti.
Odjeljci klasične mehanike
Mehanika se sastoji od nekoliko odjeljaka
- Kinematika
- Dinamika
- Statika
Kinematikasa fizičke tačke gledišta studira kako se tijelo kreće. Drugim riječima, ovaj se dio bavi kvantitativnim karakteristikama pokreta. Pronađite brzinu, stazu - tipične probleme sa kinematikama
Dinamika Odlučite pitanje zašto se kreće na ovaj način. To je, smatra da su snage koje djeluju na tijelu.
Statika Studira ravnotežu tijela pod djelovanjem snaga, odnosno odgovori na pitanje: zašto uopće ne padne?
Granice primjene klasične mehanike
Klasična mehanika više ne tvrdi status nauke koji objašnjavaju sve (početkom prošlog stoljeća sve je bilo potpuno drugačije) i ima jasan obim primjene. Općenito, zakoni klasične mehanike su nam prilično poznati u veličini svijeta (makromir). Oni prestaju raditi u slučaju svijeta čestica, kada dođe kvantni mehaničar za zamjenu klasičnog. Također, klasična mehanika ne primjenjuju se na slučajeve kada se kretanje tijela pojavi brzinom u blizini brzine svjetlosti. U takvim se slučajevima relativistički efekti izgovaraju. Grubo gledano, u okviru kvantne i relativističke mehanike - klasične mehanike, ovo je poseban slučaj kada su veličine tijela velike, a brzina je mala.

Generalno gledano, kvantni i relativistički efekti nikada ne idu nigde, oni imaju mjesto i uz uobičajeno kretanje makroskopskih tijela brzinom, mnogo male brzine svjetlosti. Još jedna stvar je da je učinak tih efekata tako malo što ne prelazi najtačnije mjerenja. Klasična mehanika, na taj način, nikada neće izgubiti svoje temeljne važnosti.
Nastavit ćemo proučavati fizičke temelje mehanike u sljedećim člancima. Za bolje razumijevanje mehanike uvijek možete kontaktirati naši autorikoji pojedinačno zamijeni svjetlo na tamnom mjestu najtežeg zadatka.