กลศาสตร์เชิงทฤษฎีสำหรับกาน้ำชา Kinematics ส่วนคงที่ของกลศาสตร์ทฤษฎี การเคลื่อนไหวคืออะไร
จลนศาสตร์
จุดวัสดุ Kinematics
การกำหนดความเร็วและการเร่งความเร็วของจุดตามสมการที่ระบุของการเคลื่อนไหว
รับ: สมการชี้: x \u003d 12 บาป (πt / 6), ซม.; y \u003d. 6 cos 2 (πt / 6)ซม.
ตั้งค่ามุมมองของวิถีและสำหรับเวลา t \u003d 1 S. ค้นหาตำแหน่งของจุดบนวิถีความเร็ว, ความเร็ว, สมบูรณ์, แทนเจนต์และการเร่งความเร็วปกติเช่นเดียวกับรัศมีของความโค้งของวิถี
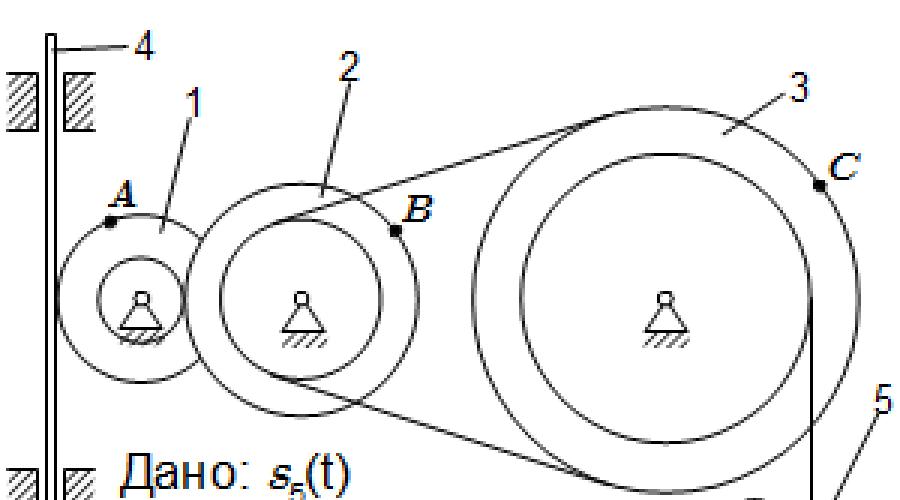
การจัดตำแหน่งและการเคลื่อนไหวของ บริษัท หมุน

รับ:
t \u003d 2 s; R 1 \u003d 2 ซม., R 1 \u003d 4 ซม.; r 2 \u003d 6 ซม., r 2 \u003d 8 ซม.; r 3 \u003d 12 ซม., r 3 \u003d 16 ซม.; S 5 \u003d T 3 - 6T (ซม.)
กำหนดเวลา T \u003d 2 ความเร็วของคะแนน A, C; การเร่งความเร็วเชิงมุมของล้อ 3; จุดเร่งความเร็วขและชั้นวางเร่ง 4.
การวิเคราะห์จลนศาสตร์ของกลไกแบน

รับ:
R 1, R 2, L, AB, ω 1
ค้นหา: ω 2.

กลไกแบนประกอบด้วยแท่ง 1, 2, 3, 4 และสไลเดอร์ E. แท่งเชื่อมต่อด้วยบานพับทรงกระบอก Point D ตั้งอยู่กลางก้าน AB
ต่วน: ω 1, ε 1.
ค้นหา: Speed \u200b\u200bV A, V B, V D และ V E; velocities เชิงมุมω 2, ω 3 และω 4; การเร่งความเร็ว B; การเร่งความเร็วเชิงมุมεลิงค์ AB; ตำแหน่งของศูนย์ความเร็วทันที P 2 และ P 3 เชื่อมโยง 2 และ 3 กลไก
ความมุ่งมั่นของความเร็วที่แน่นอนและการเร่งความเร็วที่แน่นอนของประเด็น

แผ่นสี่เหลี่ยมหมุนรอบแกนที่อยู่กับที่กฎหมายφ \u003d 6 T 2 - 3 T 3 . ทิศทางการอ้างอิงเชิงบวกของมุมφแสดงในภาพวาดของ Arc Arrow แกนหมุน OO 1 อยู่ในระนาบของแผ่น (แผ่นหมุนในอวกาศ)
ไปตามจานไปตาม BD โดยตรง Point M กำลังเคลื่อนไหว กฎหมายของการเคลื่อนไหวสัมพัทธ์ของมันได้รับ I.e. การพึ่งพา S \u003d AM \u003d 40 (T - 2 T 3) - 40 (S - เป็นเซนติเมตร, T - ในไม่กี่วินาที) ระยะทาง b \u003d. 20 ซม.. ในรูปที่จุด M แสดงอยู่ในตำแหน่งที่ S \u003d AM > 0 (ที่ S.< 0 Point M อยู่อีกด้านหนึ่งของจุด A)
ค้นหาความเร็วที่แน่นอนและจุดเร่งความเร็วสัมบูรณ์ M ในเวลา t 1 \u003d 1 วินาที.
การเปลี่ยนแปลง
การรวมสมการเชิงอนุพันธ์ของการเคลื่อนที่ของจุดวัสดุภายใต้การกระทำของแรงแปรสภาพ
Cargo D การชั่งน้ำหนัก M โดยได้รับความเร็วเริ่มต้น v 0 ที่จุด A, ย้ายในท่อ ABC โค้งที่อยู่ในระนาบแนวตั้ง ในส่วน AB ความยาวของ L ซึ่งเป็นแรงถาวร T (ทิศทางของมันจะแสดงในรูป) และความแข็งแรงของความต้านทานปานกลาง (โมดูลของแรงนี้ r \u003d μv 2 เวกเตอร์ R ถูกส่งตรงข้ามกับ velocity v ของโหลด)
การขนส่งสินค้ามีการเคลื่อนไหวเสร็จในส่วน AB ที่จุด B ของท่อโดยไม่ต้องเปลี่ยนค่าของโมดูลความเร็วของมันไปที่ส่วน BC แรงแปรสภาพ F กำลังทำงานบนพื้นที่ BC บนสินค้าการฉาย F X ซึ่งตั้งค่าเป็นแกน X
เมื่อพิจารณาถึงวัสดุสินค้าค้นหากฎของการเคลื่อนไหวของพล็อต BC I.E. x \u003d f (t) โดยที่ x \u003d bd แรงเสียดทานพื้นดินเกี่ยวกับท่อที่จะละเลย

ดาวน์โหลด Solution Task
ทฤษฎีบทในการเปลี่ยนแปลงพลังงานจลน์ของระบบเครื่องจักรกล
ระบบเครื่องจักรกลประกอบด้วยสินค้า 1 และ 2, ลานสเก็ตทรงกระบอก 3, รอกสองขั้นตอน 4 และ 5 ร่างกายของระบบเชื่อมต่อด้วยเกลียวแผลบนรอก; แปลงด้ายขนานกับเครื่องบินที่สอดคล้องกัน สเก็ตลานสเก็ต (กระบอกที่เป็นเนื้อเดียวกัน) ม้วนไปตามแนวระนาบสนับสนุนโดยไม่เลื่อน รัศมีของรอก 4 และ 5 เท่ากับลำดับ R 4 \u003d 0.3 m, R 4 \u003d 0.1 ม., R 5 \u003d 0.2 ม., R 5 \u003d 0.1 ม. มวลของแต่ละรอกถือว่ากระจายอย่างสม่ำเสมอโดยก้านภายนอก สนับสนุนเครื่องบินของสินค้า 1 และ 2 หยาบสัมประสิทธิ์แรงเสียดทานเลื่อนสำหรับแต่ละสินค้า f \u003d 0.1
ภายใต้การกระทำของแรง F, โมดูลที่มีการเปลี่ยนแปลงตามกฎหมาย f \u003d f (f f (s) โดยที่ s กำลังย้ายจุดของแอปพลิเคชันระบบมาถึงการเคลื่อนไหวจากส่วนที่เหลือของส่วนที่เหลือ เมื่อระบบสำหรับ Pulleys 5 การกระทำความต้านทานความต้านทานช่วงเวลาที่สัมพันธ์กับแกนหมุนนั้นคงที่และเท่ากับ m 5
กำหนดค่าของความเร็วเชิงมุมของรอก 4 ในเวลานั้นเมื่อการเคลื่อนไหวของจุดของแอปพลิเคชันป๊อปจะกลายเป็นเท่ากับ S 1 \u003d 1.2 ม. 
ดาวน์โหลด Solution Task
การประยุกต์สมการพลศาสตร์ทั่วไปเพื่อการศึกษาระบบกลไก
สำหรับระบบเครื่องจักรกลเพื่อตรวจสอบการเร่งความเร็วเชิงเส้น 1 สันนิษฐานว่ามีการกระจายบล็อกและมวลลูกกลิ้งผ่านรัศมีด้านนอก สายเคเบิลและสายพานถือว่าไม่มีน้ำหนักและไม่ยอมรับ สล็อคหายไป แรงเสียดทานของการกลิ้งและแรงเสียดทานลื่นที่ถูกทอดทิ้ง 
ดาวน์โหลด Solution Task
การใช้หลักการ Dalamber เพื่อกำหนดปฏิกิริยาของการแพร่กระจายของร่างกายที่รองรับ
เพลาแนวตั้ง AK หมุนอย่างสม่ำเสมอด้วยความเร็วเชิงมุมω \u003d 10 C -1 ได้รับการแก้ไขโดย Spyer ที่จุด A และตลับลูกปืนทรงกระบอกที่จุด D
ก้านน้ำหนัก 1 ลิตร 1 \u003d 0.3 ม. มีความเข้มงวดกับเพลาที่ปลายฟรีซึ่งมีมวลของ m 1 \u003d 4 กก. และก้านที่เป็นเนื้อเดียวกัน 2 L 2 \u003d 0.6 m ยาวมีมวล m 2 \u003d 8 กก. แท่งทั้งสองนอนอยู่ในระนาบแนวตั้งหนึ่ง จุดของการติดแท่งไปยังเพลาเช่นเดียวกับมุมαและβจะถูกระบุในตาราง Dimensions AB \u003d BD \u003d de \u003d ek \u003d B โดยที่ B \u003d 0.4 ม. ขนส่งสินค้าที่จะใช้สำหรับจุดวัสดุ
ละเลยมวลของเพลาให้กำหนดปฏิกิริยาของ Swaper และแบริ่ง

Kinematics Point
1. เรื่องของกลศาสตร์ทฤษฎี abstractions พื้นฐาน
กลศาสตร์ทฤษฎี- นี่คือวิทยาศาสตร์ที่กฎหมายทั่วไปของการเคลื่อนไหวเชิงกลและการมีปฏิสัมพันธ์เชิงกลของวัตถุวัสดุ
การเคลื่อนไหวเชิงกล มันเรียกว่าการเคลื่อนไหวของร่างกายที่สัมพันธ์กับร่างกายอื่นที่เกิดขึ้นในอวกาศและเวลา
ปฏิสัมพันธ์เชิงกล มันถูกเรียกว่าการมีปฏิสัมพันธ์กับวัตถุวัสดุซึ่งเปลี่ยนลักษณะของการเคลื่อนไหวเชิงกลของพวกเขา
วิชาว่าด้วยวัตถุ - นี่คือส่วนของกลศาสตร์เชิงทฤษฎีซึ่งการศึกษาวิธีการในการเปลี่ยนแปลงของระบบความแข็งแรงให้กับระบบที่เทียบเท่าและกำหนดสภาพสมดุลที่ติดอยู่กับร่างกายที่เป็นของแข็ง
จลนศาสตร์ - ส่วนนี้ของกลศาสตร์ทฤษฎีที่ศึกษา การเคลื่อนไหวของวัตถุวัสดุในอวกาศจากมุมมองทางเรขาคณิตโดยไม่คำนึงถึงกองกำลังที่ทำหน้าที่พวกเขา
การเปลี่ยนแปลง - นี่คือส่วนของกลศาสตร์ที่การเคลื่อนไหวของวัตถุวัสดุในอวกาศขึ้นอยู่กับกองกำลังที่ทำหน้าที่กับพวกเขา
วัตถุของการศึกษาในกลศาสตร์เชิงทฤษฎี:
จุดวัสดุ
ระบบ Dot วัสดุ
ร่างกายที่มั่นคงอย่างแน่นอน
พื้นที่สัมบูรณ์และเวลาที่แน่นอนอย่างอิสระหนึ่งในอื่น ๆ อวกาศ - พื้นที่ยุคสามมิติที่เป็นเนื้อเดียวกันและเป็นเนื้อเดียวกัน เวลาแน่นอน - ไหลจากอดีตไปจนถึงอนาคตอย่างต่อเนื่องมันสม่ำเสมอในทุกจุดของพื้นที่และไม่ได้ขึ้นอยู่กับการเคลื่อนไหวของสสาร
2. เรื่องของ Kinematics
Kinematics - กลไกในส่วนนี้ซึ่งมีการศึกษาคุณสมบัติทางเรขาคณิตของการเคลื่อนไหวของร่างกายโดยไม่คำนึงถึงความเฉื่อยของพวกเขา (เช่นมวลชน) และกองกำลังทำหน้าที่พวกเขา
เพื่อกำหนดตำแหน่งของร่างกายที่เคลื่อนไหว (หรือจุด) กับร่างกายนั้นสัมพันธ์กับการเคลื่อนไหวของร่างกายนี้การศึกษาอย่างเหนียวแน่นผูกระบบพิกัดบางอย่างที่เกิดขึ้นพร้อมกับร่างกาย ระบบอ้างอิง
ภารกิจหลักของ Kinematics มันคือการรู้กฎของการเคลื่อนไหวของร่างกายนี้ (จุด) เพื่อตรวจสอบค่า Kinematic ทั้งหมดที่มีลักษณะการเคลื่อนไหว (ความเร็วและการเร่งความเร็ว)
3. วิธีการตั้งค่าการเคลื่อนไหวจุด
· วิธีธรรมชาติ
มันควรเป็นที่รู้จัก:
จุดเคลื่อนไหววิถี;
เริ่มต้นและทิศทางของการอ้างอิง;
กฎของการเคลื่อนไหวของจุดตามวิถีที่กำหนดในแบบฟอร์ม (1.1)
· วิธีการประสานงาน
สมการ (1.2) - สมการของการเคลื่อนไหวของ M.
สมการของวิถีของจุด m สามารถรับได้โดยไม่รวมพารามิเตอร์เวลา « ต. » จากสมการ (1.2)
· แฟชั่นเวกเตอร์
|
|
(1.3) การสื่อสารระหว่างพิกัดและวิธีการเวกเตอร์ของจุดเคลื่อนไหวของจุด
|

การสื่อสารระหว่างการประสานงานและวิธีธรรมชาติของการจราจรเป้าหมาย
กำหนดเส้นทางจุดกำจัดเวลาจากสมการ (1.2);
-- ค้นหากฎของการเคลื่อนไหวของจุดตามเส้นทาง (ใช้นิพจน์เพื่อความแตกต่างของอาร์ค)
หลังจากการบูรณาการเราได้กฎการเคลื่อนไหวของจุดตามวิถีที่กำหนด:
ความสัมพันธ์ระหว่างการประสานงานและวิธีการเวกเตอร์ของจุดเคลื่อนไหวของจุดนั้นถูกกำหนดโดยสมการ (1.4)
4. การกำหนดความเร็วของจุดในวิธีการเวกเตอร์ในการตั้งค่าการเคลื่อนไหว
ปล่อยเวลาต.ตำแหน่งของจุดถูกกำหนดโดยรัศมี - เวกเตอร์และในช่วงเวลาของเวลาต. 1
- รัศมี - เวกเตอร์แล้วเมื่อเวลาผ่านไป ![]() จุดที่จะย้าย
จุดที่จะย้าย
|
|
จุดเฉลี่ยของจุด กำกับเวกเตอร์เช่นเดียวกับเวกเตอร์
|

 (1.5)
(1.5)
จุดจุด ณ เวลาที่กำหนด
เพื่อให้ได้ความเร็วของจุดในขณะนี้มีความจำเป็นต้อง จำกัด
 (1.6)
(1.6)
(1.7)
เวกเตอร์ความเร็วจุดในปัจจุบัน มันเท่ากับอนุพันธ์แรกของรัศมี - เวกเตอร์ในเวลาและมีวัตถุประสงค์เพื่อสัมผัสกับวิถีในจุดนี้
(หน่วย¾ M / S, KM / H)
การเร่งความเร็วกลางเวกเตอร์ มีทิศทางเดียวกันกับเวกเตอร์Δ v. นั่นคือจุดมุ่งหมายต่อความคืบหน้าของวิถี
จุดเร่งของเวกเตอร์ในเวลาที่กำหนด มันเท่ากับอนุพันธ์แรกของเวกเตอร์ Velocity หรืออนุพันธ์ที่สองของรัศมี - เวกเตอร์จุดในเวลา
หน่วยวัด -)
เวกเตอร์สัมพันธ์กับจุดวิถีอย่างไร
ด้วยการเคลื่อนที่ของเส้นตรงเวกเตอร์ถูกนำไปตามโดยตรงซึ่งจะย้ายประเด็น หากวิถีเส้นทางเป็นเส้นโค้งแบนจากนั้นความเร็วในการเร่งความเร็วเช่นเดียวกับเวกเตอร์ของพุธที่อยู่ในระนาบของเส้นโค้งนี้และถูกชี้นำไปสู่ความเห็นศีรษะ หากวิถีไม่เป็นเส้นโค้งแบนเวกเตอร์ของ CP จะถูกนำไปสู่ความคืบหน้าของวิถีและจะอยู่ในระนาบที่ผ่านสัมผัสกับ Tangent ไปที่เส้นทางที่จุดเอ็ม และตรงไปด้วยกันขนานในจุดต่อไปm 1. . ใน จำกัด เมื่อจุดm 1. พยายามที่จะ เอ็ม เครื่องบินลำนี้ใช้ตำแหน่งของระนาบสัมผัสที่เรียกว่า ดังนั้นในกรณีทั่วไปเวกเตอร์ความเร่งจึงอยู่ในระนาบสัมผัสและนำไปสู่การฝากของเส้นโค้ง
ทฤษฎีทั่วไปของลำโพงของระบบร่างกาย ทฤษฎีเกี่ยวกับการเคลื่อนไหวของศูนย์กลางของมวลประมาณการเปลี่ยนปริมาณการเคลื่อนไหวเกี่ยวกับการเปลี่ยนจุดหลักของปริมาณการเคลื่อนไหวเกี่ยวกับการเปลี่ยนพลังงานจลน์ หลักการของ Dalambert และการเคลื่อนไหวที่เป็นไปได้ สมการทั่วไปของลำโพง สมการ lagrange
เนื้อหางานที่กำลังทำ เท่ากับผลิตภัณฑ์สเกลาร์ของเวกเตอร์ความแข็งแรงและการเคลื่อนไหวเล็ก ๆ เล็กน้อยของประยุกต์ใช้:
,
นั่นคือผลิตภัณฑ์ของโมดูลของเวกเตอร์ F และ DS บนโคไซน์ของมุมระหว่างพวกเขา
ทำงานที่ช่วงเวลาของกองกำลัง เท่ากับผลิตภัณฑ์สเกลาร์ของเวกเตอร์แรงบิดและมุมการหมุนขนาดเล็กอย่างไม่สิ้นสุด:
.
หลักการของ Dalamber
สาระสำคัญของหลักการของ Dalamber คือการมอบหมายให้ผู้พูดเพื่อลดภารกิจแบบคงที่ สำหรับสิ่งนี้จะถือว่า (หรือเป็นที่รู้จักกันล่วงหน้า) ว่าร่างกายของระบบมีการเร่งความเร็ว (เชิงมุม) บางอย่าง ถัดไปมีการแนะนำความเฉื่อยและ (หรือ) ช่วงเวลาของกองกำลังความเฉื่อยซึ่งมีขนาดเท่ากันและย้อนกลับในทิศทางของกองกำลังและช่วงเวลาของกองกำลังซึ่งตามกฎหมายของกลศาสตร์จะสร้างการเร่งความเร็วที่ระบุหรือ การเร่งความเร็วเชิงมุม
พิจารณาตัวอย่าง เส้นทางของร่างกายมุ่งมั่นการเคลื่อนไหวการแปลและกองกำลังภายนอกทำหน้าที่ ต่อไปเราคิดว่ากองกำลังเหล่านี้สร้างการเร่งความเร็วของศูนย์กลางของระบบมวล ตามทฤษฎีเกี่ยวกับการเคลื่อนไหวของศูนย์กลางของมวลชนของมวลของร่างกายจะมีการเร่งความเร็วเดียวกันหากมีการดำเนินการพลังงานบนร่างกาย ต่อไปเราแนะนำพลังของความเฉื่อย:
.
หลังจากนั้นงานของลำโพง:
.
;
.
สำหรับการเคลื่อนไหวแบบหมุนมาในลักษณะเดียวกัน ปล่อยให้ร่างกายหมุนรอบแกน z และมีช่วงเวลาภายนอกของ m e zk สำหรับมัน เราคิดว่าช่วงเวลาเหล่านี้สร้างความเร่งเชิงมุมε z ต่อไปเราแนะนำช่วงเวลาของกองกำลังของความเฉื่อย M และ \u003d - J Z ε Z หลังจากนั้นงานของลำโพง:
.
เปลี่ยนเป็นภารกิจของแบบคงที่:
;
.
หลักการเคลื่อนไหวที่เป็นไปได้
หลักการของการเคลื่อนไหวที่เป็นไปได้ใช้ในการแก้ปัญหาแบบสถิตยัตร ในบางงานมันให้การแก้ปัญหาที่สั้นกว่าการวาดสมการสมการ นี่เป็นเรื่องจริงโดยเฉพาะอย่างยิ่งของระบบที่มีการเชื่อมต่อ (ตัวอย่างเช่นเนื้อหาที่เชื่อมต่อด้วยเธรดและบล็อก) ประกอบด้วยวัตถุจำนวนมาก
หลักการเคลื่อนไหวที่เป็นไปได้.
สำหรับความสมดุลของระบบเครื่องจักรกลที่มีพันธะอุดมคติมีความจำเป็นและเพียงพอที่ผลรวมของงานระดับประถมศึกษาของกองกำลังที่ใช้งานทั้งหมดที่ทำหน้าที่กับการเคลื่อนไหวของระบบที่เป็นไปได้นั้นเป็นศูนย์
การเคลื่อนไหวที่เป็นไปได้ของระบบ - นี่คือการเคลื่อนไหวเล็ก ๆ ที่การเชื่อมต่อที่กำหนดไว้ในระบบจะไม่ถูกละเมิด
การเชื่อมต่อที่เหมาะ - นี่คือการเชื่อมต่อที่ไม่ทำงานเมื่อเคลื่อนย้ายระบบ แม่นยำยิ่งขึ้นจำนวนงานที่ดำเนินการโดยการเชื่อมต่อตัวเองเมื่อระบบกำลังเคลื่อนที่เป็นศูนย์
สมการทั่วไปของลำโพง (หลักการของ Dalamber - Lagrange)
หลักการของ Dalamber - Lagrange เป็นความสัมพันธ์ของหลักการของ Dalambert กับหลักการของการเคลื่อนไหวที่เป็นไปได้ นั่นคือเมื่อแก้ปัญหาของพลวัตเราแนะนำกองกำลังความเฉื่อยและลดงานของสถิติที่เราแก้ปัญหาด้วยความช่วยเหลือของหลักการของการเคลื่อนไหวที่เป็นไปได้
หลักการของ Dalamber - Lagrange.
เมื่อย้ายระบบเครื่องจักรกลที่มีพันธะที่เหมาะในแต่ละช่วงเวลาผลรวมของงานระดับประถมศึกษาของกองกำลังที่ใช้งานทั้งหมดและแรงเฉื่อยทั้งหมดในการเคลื่อนย้ายระบบใด ๆ ที่เป็นไปได้ของระบบ:
.
สมการนี้เรียกว่า สมการโดยรวมของลำโพง.
สมการ lagrange
พิกัดทั่วไป Q. 1, Q 2, ... , Q N - นี่คือการรวมกันของค่า n ที่กำหนดตำแหน่งของระบบอย่างไม่ชัดเจน
จำนวนพิกัดทั่วไป n เกิดขึ้นพร้อมกับจำนวนองศาอิสระของระบบ
ความเร็วทั่วไป - สิ่งเหล่านี้ได้มาจากพิกัดทั่วไปของเวลา t
กองกำลังทั่วไป Q. 1, Q 2, ... , Q N
.
พิจารณาการเคลื่อนไหวที่เป็นไปได้ของระบบที่พิกัด Q K จะได้รับการเคลื่อนไหวδq k พิกัดที่เหลือยังคงไม่เปลี่ยนแปลง ให้δa k เป็นงานที่ดำเนินการโดยกองกำลังภายนอกด้วยการเคลื่อนไหวดังกล่าว จากนั้น
δa k \u003d q k δq k หรือ
.
หากมีการเคลื่อนไหวที่เป็นไปได้ของระบบพิกัดทั้งหมดมีการเปลี่ยนแปลงงานที่ดำเนินการโดยกองกำลังภายนอกด้วยการย้ายดังกล่าวมีแบบฟอร์ม:
δa \u003d Q. 1 δQ 1 + Q 2 δq 2 + ... + Q n δq n.
จากนั้นกองกำลังทั่วไปเป็นอนุพันธ์บางส่วนจากงานการเคลื่อนไหว:
.
สำหรับกองกำลังที่มีศักยภาพ ด้วยศักยภาพπ,
.
สมการ lagrange - นี่คือสมการของระบบเครื่องจักรกลในพิกัดทั่วไป:
ที่นี่ t เป็นพลังงานจลน์ มันเป็นฟังก์ชั่นของพิกัดทั่วไปความเร็วและอาจเป็นเวลา ดังนั้นอนุพันธ์ส่วนตัวของมันจึงเป็นหน้าที่ของพิกัดทั่วไปความเร็วและเวลา ถัดไปมีความจำเป็นต้องพิจารณาว่าพิกัดและความเร็วเป็นฟังก์ชั่นของเวลา ดังนั้นเพื่อค้นหาอนุพันธ์ที่สมบูรณ์แบบในเวลาคุณต้องใช้กฎความแตกต่างของฟังก์ชั่นที่ซับซ้อน:
.
ข้อมูลอ้างอิง:
S. M. Targ หลักสูตรสั้น ๆ ของกลศาสตร์ทฤษฎี "โรงเรียนมัธยม", 2010
หลักสูตรนี้ได้รับการพิจารณา: Kinematics ของจุดและร่างกายที่เป็นของแข็ง (และจากมุมมองที่แตกต่างกันมันเสนอให้พิจารณาปัญหาของการวางแนวของที่มั่นคง) งานคลาสสิกของการเปลี่ยนแปลงของระบบเครื่องจักรกลและพลวัตของร่างกายที่เป็นของแข็ง องค์ประกอบของกลศาสตร์ท้องฟ้าการเคลื่อนไหวของระบบองค์ประกอบตัวแปรทฤษฎีของผลกระทบสมการเชิงอนุพันธ์ของการเปลี่ยนแปลงการวิเคราะห์
ส่วนทั้งหมดของกลศาสตร์ทฤษฎีทั้งหมดจะถูกนำเสนอ แต่ความสนใจเป็นพิเศษจะจ่ายให้กับการพิจารณาของทฤษฎีและการใช้งานที่มีคุณค่ามากที่สุดสำหรับพลวัตและวิธีการของกลไกการวิเคราะห์ สถิตถูกศึกษาเป็นส่วนของลำโพงและในส่วน Kinematics แนวคิดและเครื่องมือทางคณิตศาสตร์ได้รับการแนะนำในรายละเอียด
ทรัพยากรที่ให้ข้อมูล
Gantmakher F.r. การบรรยายเกี่ยวกับกลศาสตร์การวิเคราะห์ - 3rd ed - ม.: Fizmatlit, 2001
zhuravleov v.f. พื้นฐานของกลศาสตร์ทฤษฎี - 2nd ed. - ม.: Fizmatlit, 2001; 3rd ed. - ม.: Fizmatlit, 2008
Markeev A.p. กลศาสตร์ทฤษฎี - มอสโก - Izhevsk: NIC "พลวัตปกติและวุ่นวาย", 2007
ความต้องการ
หลักสูตรนี้ออกแบบมาสำหรับนักเรียนที่มีรูปทรงเรขาคณิตเชิงวิเคราะห์และพีชคณิตเชิงเส้นในขอบเขตของหลักสูตรแรกของมหาวิทยาลัยเทคนิค
โปรแกรมหลักสูตร
1. คะแนน Kinematics
1.1 งานจลนศาสตร์ ระบบพิกัดของ Decartova การสลายตัวของเวกเตอร์โดยพื้นฐาน orthonormal RADIUS เวกเตอร์และพิกัดจุด ความเร็วและจุดเร่งความเร็ว วิถีการเคลื่อนไหว
1.2 ทริกเกอร์ธรรมชาติ การสลายตัวของความเร็วและการเร่งความเร็วในแกนของธรรมชาติสามเหลี่ยมธรรมชาติ (ทฤษฎีบท Guigens)
1.3 พิกัดโค้งของจุดตัวอย่าง: ขั้วโลก, ทรงกระบอกและระบบพิกัดทรงกลม ส่วนประกอบและการคาดการณ์ของการเร่งความเร็วบนแกนของระบบพิกัด Curvilinear
2. วิธีในการกำหนดทิศทางของร่างกายที่เป็นของแข็ง
2.1 ของแข็ง ระบบพิกัดแบบคงที่และผูกพัน
2.2 เมทริกซ์เทิร์นมุมฉากและคุณสมบัติของพวกเขา ทฤษฎีบทออยเลอร์เกี่ยวกับการเลี้ยวสุดท้าย
2.3 มุมมองที่ใช้งานและเรื่อย ๆ ในการเปลี่ยนแปลงมุมฉาก การเพิ่มผลัดกัน
2.4 มุมของการหมุน จำกัด : มุมของออยเลอร์และมุม "เครื่องบิน" การแสดงออกของเมทริกซ์มุมฉากผ่านมุมของการหมุนที่ จำกัด
3. การเคลื่อนไหวเชิงพื้นที่ของของแข็ง
3.1 การเคลื่อนที่ป้องกันและการหมุนของร่างกายที่เป็นของแข็ง ความเร็วมุมและการเร่งเชิงมุม
3.2 การกระจายความเร็วของ Velocities (สูตรออยเลอร์) และการเร่งความเร็ว (สูตรคู่แข่ง) ของจุดแข็ง
3.3 ค่าธรรมเนียม Kinematic สกรูจลนศาสตร์ แกนสกรูทันที
4. การเคลื่อนไหวแบบขนานแบน
4.1 แนวคิดของการเคลื่อนไหวของร่างกายขนาน ความเร็วมุมและความเร่งเชิงมุมในกรณีของการเคลื่อนไหวแบบขนานของเครื่องบิน ศูนย์ความเร็วทันที
5. การเคลื่อนไหวที่ซับซ้อนของจุดและร่างกายที่เป็นของแข็ง
5.1 ระบบพิกัดคงที่และเคลื่อนย้าย การเคลื่อนไหวจุดที่แน่นอนญาติและพกพา
5.2 ทฤษฎีบทในการเพิ่มความเร็วที่มีการเคลื่อนไหวที่ซับซ้อนของจุดความสัมพันธ์และความเร็วแบบพกพา ทฤษฎีบท Coriolis เกี่ยวกับการเติมเร่งด้วยการเคลื่อนไหวที่ซับซ้อนของจุดที่เกี่ยวข้องแบบพกพาและการเร่งความเร็ว Coriolis
5.3 ความเร็วเชิงลึกสัมพัทธ์และแบบพกพาและการเร่งความเร็วเชิงมุมของร่างกาย
6. การเคลื่อนไหวของของแข็งด้วยจุดคงที่ (การนำเสนอ Quaternion)
6.1 แนวคิดของตัวเลขที่ซับซ้อนและ hypercomplex quaternions พีชคณิต ทำงาน Quaternion contamed และย้อนกลับ Quaternion, บรรทัดฐานและโมดูล
6.2 การเป็นตัวแทนตรีโกณมิติของ Quaternion เดียว วิธี Quaternion ในการตั้งค่าการเปิดร่างกาย ทฤษฎีบทออยเลอร์เกี่ยวกับการเลี้ยวสุดท้าย
6.3 การสื่อสารระหว่างคอมโพเนนต์ Quaternion ในฐานที่แตกต่างกัน การเพิ่มผลัดกัน พารามิเตอร์ Rodriga Hamilton
7. งานตรวจสอบ
8. แนวคิดพื้นฐานของพลวัต
8.1 ชีพจรช่วงเวลาของแรงกระตุ้น (ช่วงเวลาจินติน) พลังงานจลน์
8.2 พลังของกองกำลังความพยายามในการทำงานศักยภาพและพลังงานเต็มที่
8.3 ระบบ Mass Center (Inertia) ช่วงเวลาของความเฉื่อยของระบบที่เกี่ยวข้องกับแกน
8.4 ช่วงเวลาของความเฉื่อยเมื่อเทียบกับแกนขนาน Guiggens-Steiner ทฤษฎีบท
8.5 ทินเตอร์และจุดไข่ปลาความเฉื่อย แกนหลักของความเฉื่อย คุณสมบัติของช่วงเวลาตามแนวแกนความเฉื่อย
8.6 การคำนวณช่วงเวลาของแรงกระตุ้นและพลังงานแสงจลิกด้วยเทนเซอร์ความเฉื่อย
9. ทฤษฎีบทลำโพงหลักในระบบอ้างอิงเฉื่อยและไม่เฉื่อย
9.1 ทฤษฎีบทในการเปลี่ยนแปลงในระบบแรงกระตุ้นในระบบอ้างอิงเฉื่อย ทฤษฎีบทในการเคลื่อนไหวของศูนย์กลางของมวล
9.2 ทฤษฎีบทในการเปลี่ยนช่วงเวลาของระบบชีพจรในระบบอ้างอิงเฉื่อย
9.3 ทฤษฎีบทในการเปลี่ยนแปลงพลังงานจลน์ของระบบในระบบอ้างอิงเฉื่อย
9.4 ศักยภาพการหมุนเวียนและการกระจายตัว
9.5 ทฤษฎีบทลำโพงหลักในระบบอ้างอิงที่ไม่ชื้น
10. การเคลื่อนไหวของร่างกายที่เป็นของแข็งด้วยจุดคงที่ด้วยความเฉื่อย
10.1 สมการออยเลอร์แบบไดนามิก
10.2 กรณีออยเลอร์อินทิกรัลแรกของสมการแบบไดนามิก; การหมุนถาวร
10.3 การตีความ Ponaso และ McKoull
10.4 ความแม่นยำปกติในกรณีของสมมาตรแบบไดนามิกของร่างกาย
11. การเคลื่อนไหวของร่างกายแข็งหนักที่มีจุดคงที่
11.1 การตั้งค่าทั่วไปของการเคลื่อนไหวของแข็งหนัก ๆ
จุดคงที่ สมการออยเลอร์แบบไดนามิกและอินทิกรัลแรกของพวกเขา
11.2 การวิเคราะห์เชิงคุณภาพของการเคลื่อนไหวที่มั่นคงในกรณีของ Lagrange
11.3 บังคับให้มีความแม่นยำปกติของร่างกายที่เป็นของแข็งสมมาตรแบบไดนามิก
11.4 สูตร gyroscopy พื้นฐาน
11.5 แนวคิดของทฤษฎีประถมศึกษาของ Gyroscopes
12. พลวัตในฟิลด์กลาง
12.1 สมการ BINA
12.2 สมการ Orbita กฎหมายเคปเลอร์
12.3 งานกระเจิง
12.4 งานสองโทร. สมการของการเคลื่อนไหว Integral of Square, Integral Energy, Laplace Integral
13. การเปลี่ยนแปลงของระบบองค์ประกอบตัวแปร
13.1 แนวคิดพื้นฐานและทฤษฎีบทในการเปลี่ยนค่าแบบไดนามิกขั้นพื้นฐานในระบบองค์ประกอบที่แปรผัน
13.2 การเคลื่อนที่ของมวลตัวแปรวัสดุ
13.3 สมการของการเคลื่อนไหวของร่างกายขององค์ประกอบตัวแปร
14. ทฤษฎีการเคลื่อนไหวหุนหันพลันแล่น
14.1 แนวคิดพื้นฐานและสัจพจน์ของการเคลื่อนไหวหุนหันพลันแล่น
14.2 ทฤษฎีเกี่ยวกับการเปลี่ยนแปลงในค่าแบบไดนามิกขั้นพื้นฐานในการเคลื่อนไหวหุนหันพลันแล่น
14.3 การเคลื่อนไหวของเฟิร์มแวลหุนหันพลันแล่น
14.4 การปะทะกันของร่างกายที่เป็นของแข็งสองตัว
14.5 ทฤษฎีของคาร์โน
15. การตรวจสอบ
ผลการเรียนรู้
อันเป็นผลมาจากการพัฒนาวินัยนักเรียนจะต้อง:
- ทราบ:
- แนวคิดหลักและทฤษฎีของกลศาสตร์และวิธีการศึกษาการเคลื่อนไหวของระบบเครื่องจักรกลที่เกิดจากพวกเขา
- สามารถ:
- กำหนดปัญหาอย่างถูกต้องในแง่ของกลศาสตร์ทฤษฎี;
- พัฒนาแบบจำลองเชิงกลและคณิตศาสตร์สะท้อนให้เห็นถึงคุณสมบัติพื้นฐานของปรากฏการณ์ที่อยู่ระหว่างการพิจารณาอย่างเพียงพอ
- ใช้ความรู้ที่ได้รับเพื่อแก้ปัญหาเฉพาะที่สอดคล้องกัน
- เป็นเจ้าของ:
- ทักษะในการแก้ปัญหาคลาสสิกของกลศาสตร์ทฤษฎีและคณิตศาสตร์
- ทักษะในการศึกษาปัญหาของกลไกและการสร้างแบบจำลองเชิงกลและคณิตศาสตร์ที่อธิบายถึงปรากฏการณ์เชิงกลที่หลากหลาย
- ทักษะการใช้วิธีการและหลักการของกลไกทางทฤษฎีในการแก้ปัญหา: การคำนวณพลังงานการกำหนดลักษณะ Kinematic ของร่างกายที่มีวิธีการต่าง ๆ ในการกำหนดการเคลื่อนไหวการกำหนดกฎของการเคลื่อนไหวของวัตถุวัสดุและระบบเครื่องจักรกลภายใต้การกระทำของ กองกำลัง;
- ทักษะอย่างอิสระเชี่ยวชาญใหม่ในกระบวนการของกิจกรรมอุตสาหกรรมและวิทยาศาสตร์โดยใช้เทคโนโลยีการศึกษาและข้อมูลที่ทันสมัย
ภายในกรอบการฝึกอบรมใด ๆ การศึกษาฟิสิกส์เริ่มต้นด้วยกลศาสตร์ ไม่ได้มีทฤษฎีไม่ใช่ด้วยการใช้งานและไม่ใช้คอมพิวเตอร์ แต่ด้วยกลศาสตร์คลาสสิกที่ดีเก่า กลศาสตร์นี้เรียกว่ากลศาสตร์นิวตัน ตามตำนานนักวิทยาศาสตร์เดินไปรอบ ๆ สวนได้เห็นแอปเปิ้ลฟอลส์และเป็นปรากฏการณ์นี้ที่ผลักเขาเข้าสู่การเปิดโลกของโลกแห่งโลก แน่นอนว่ากฎหมายมีอยู่เสมอและนิวตันเพียงให้เขาเป็นรูปแบบที่เข้าใจได้ แต่บุญของเขามีค่ามาก ในบทความนี้เราจะไม่ทาสีกฎหมายของกลไกของนิวตันในรายละเอียดมากที่สุดเท่าที่จะเป็นไปได้ แต่ระบุพื้นฐานความรู้พื้นฐานคำจำกัดความและสูตรที่สามารถเล่นในมือของคุณได้ตลอดเวลา
กลศาสตร์ - ส่วนของฟิสิกส์วิทยาศาสตร์ที่ศึกษาการเคลื่อนไหวของวัตถุวัสดุและการมีปฏิสัมพันธ์ระหว่างพวกเขา
คำว่าตัวเองมีต้นกำเนิดกรีกและแปลว่า "เครื่องสร้างศิลปะ" แต่ก่อนที่จะสร้างรถยนต์เรายังคงต้องการดวงจันทร์ดังนั้นเราไปข้างบนฝีเท้าของบรรพบุรุษของเราและเราจะศึกษาการเคลื่อนไหวของหินที่โยนมุมไปที่ขอบฟ้าและแอปเปิ้ลที่ตกลงมาบนหัวจากความสูง H

เหตุใดการศึกษาฟิสิกส์จึงเริ่มต้นด้วยกลไก เพราะมันเป็นธรรมชาติอย่างสมบูรณ์ไม่ใช่จากความสมดุลทางอุณหพลศาสตร์เพื่อเริ่มมัน?!
กลศาสตร์เป็นหนึ่งในวิทยาศาสตร์ที่เก่าแก่ที่สุดและฟิสิกส์การเรียนรู้ในอดีตเริ่มต้นด้วยพื้นฐานของกลศาสตร์ วางไว้ในกรอบเวลาและพื้นที่ผู้คนในความเป็นจริงไม่สามารถเริ่มต้นด้วยสิ่งอื่นด้วยความปรารถนาทั้งหมด Moving Bodies - สิ่งแรกที่เราให้ความสนใจของคุณ
การเคลื่อนไหวคืออะไร?
การเคลื่อนไหวเชิงกลเป็นการเปลี่ยนแปลงในตำแหน่งของร่างกายในอวกาศที่สัมพันธ์กันเมื่อเวลาผ่านไป
มันเป็นหลังจากนิยามนี้ที่เรามาถึงแนวคิดของระบบอ้างอิงอย่างเป็นธรรมชาติ การเปลี่ยนตำแหน่งของร่างกายในอวกาศที่สัมพันธ์กับกันและกัน คำสำคัญที่นี่: ญาติ ๆ . ท้ายที่สุดผู้โดยสารในรถเคลื่อนที่ค่อนข้างยืนอยู่ข้างสนามของบุคคลในความเร็วที่แน่นอนและวางอยู่บนเพื่อนบ้านของเขาบนที่นั่งใกล้เคียงและเคลื่อนที่ด้วยความเร็วอื่น ๆ ที่สัมพันธ์กับผู้โดยสารในรถที่แซงพวกเขา

นั่นคือเหตุผลที่เพื่อวัดพารามิเตอร์ของวัตถุที่เคลื่อนไหวตามปกติและไม่สับสนเราต้องการ ระบบอ้างอิงคือการนับถอยหลังที่เกี่ยวข้องอย่างเข้มงวดระบบพิกัดและนาฬิกา ตัวอย่างเช่นโลกเคลื่อนที่ไปรอบ ๆ ดวงอาทิตย์ในระบบอ้างอิง Heli-centered ในการวัดเกือบทั้งหมดเราใช้จ่ายในระบบอ้างอิง Geocentric ที่เกี่ยวข้องกับโลก โลกนี้เป็นร่างกายอ้างอิงที่สัมพันธ์กับรถยนต์ที่กำลังเคลื่อนย้ายเครื่องบินผู้คนสัตว์

กลศาสตร์เช่นวิทยาศาสตร์มีงานของตัวเอง งานของกลศาสตร์ - ตลอดเวลาที่จะรู้ตำแหน่งของร่างกายในอวกาศ กล่าวอีกนัยหนึ่งช่างกำลังสร้างคำอธิบายทางคณิตศาสตร์เกี่ยวกับการเคลื่อนไหวและค้นหาความสัมพันธ์ระหว่างปริมาณทางกายภาพซึ่งมีลักษณะ
เพื่อที่จะย้ายต่อไปเราจะต้องมีแนวคิด " จุดวัสดุ . พวกเขาพูดว่าฟิสิกส์ - วิทยาศาสตร์ที่แม่นยำ แต่นักฟิสิกส์รู้ว่าการประมาณจำนวนและสมมติฐานต้องทำเพื่อประสานงานความแม่นยำนี้มากเพียงใด ไม่มีใครเคยเห็นจุดวัสดุและไม่ได้กลิ่นก๊าซที่สมบูรณ์แบบ แต่พวกเขา! พวกเขาใช้ชีวิตได้ง่ายขึ้นมาก
จุดวัสดุคือร่างกายขนาดและรูปแบบที่ในบริบทของงานนี้สามารถละเลยได้
ส่วนของกลศาสตร์คลาสสิก
กลศาสตร์ประกอบด้วยหลายส่วน
- จลนศาสตร์
- การเปลี่ยนแปลง
- วิชาว่าด้วยวัตถุ
จลนศาสตร์จากมุมมองทางกายภาพเขาศึกษาว่าร่างกายเคลื่อนที่ กล่าวอีกนัยหนึ่งส่วนนี้มีส่วนร่วมในลักษณะเชิงปริมาณของการเคลื่อนไหว ค้นหาความเร็วเส้นทาง - ปัญหาการจลนศาสตร์ทั่วไป
การเปลี่ยนแปลง ตัดสินใจคำถามว่าทำไมมันถึงเคลื่อนที่ด้วยวิธีนี้ นั่นคือถือว่ากองกำลังทำหน้าที่อยู่บนร่างกาย
วิชาว่าด้วยวัตถุ เขาศึกษาความสมดุลของร่างกายภายใต้การกระทำของกองกำลังนั่นคือคำตอบคำถาม: ทำไมมันไม่ตกเลย?
ขอบเขตของการบังคับใช้กลศาสตร์คลาสสิก
กลไกคลาสสิกไม่ได้อ้างถึงสถานะของวิทยาศาสตร์ที่อธิบายทุกอย่าง (ในช่วงต้นศตวรรษที่ผ่านมาทุกอย่างแตกต่างกันอย่างสิ้นเชิง) และมีขอบเขตการบังคับใช้ที่ชัดเจน โดยทั่วไปกฎหมายของกลศาสตร์คลาสสิกค่อนข้างคุ้นเคยกับเราในขนาดของโลก (Macromir) พวกเขาหยุดทำงานในกรณีของโลกของอนุภาคเมื่อกลไกควอนตัมมาแทนที่คลาสสิก นอกจากนี้กลศาสตร์คลาสสิกไม่สามารถใช้ได้กับกรณีเมื่อการเคลื่อนไหวของร่างกายเกิดขึ้นที่ความเร็วใกล้กับความเร็วแสง ในกรณีเช่นนี้เอฟเฟกต์ relativistic กลายเป็นเด่นชัด การพูดอย่างคร่าว ๆ ภายในกรอบของกลศาสตร์ควอนตัมและฟอร์แมต - กลศาสตร์คลาสสิกนี่เป็นกรณีพิเศษเมื่อขนาดของร่างกายมีขนาดใหญ่และความเร็วมีขนาดเล็ก

การพูดโดยทั่วไปเอฟเฟกต์ควอนตัมและสัโต้ได้ไม่เคยไปทุกที่พวกเขามีสถานที่ที่จะเป็นและด้วยการเคลื่อนไหวปกติของวัตถุ macroscopic ด้วยความเร็วความเร็วที่ต่ำกว่ามาก อีกสิ่งหนึ่งคือผลกระทบของผลกระทบเหล่านี้น้อยมากที่ไม่ได้ไปเกินกว่าการวัดที่แม่นยำที่สุด กลศาสตร์คลาสสิกดังนั้นจะไม่สูญเสียความสำคัญขั้นพื้นฐาน
เราจะศึกษารากฐานทางกายภาพต่อไปในบทความต่อไปนี้ต่อไป เพื่อความเข้าใจที่ดีขึ้นเกี่ยวกับกลศาสตร์ที่คุณสามารถติดต่อได้เสมอ ผู้เขียนของเราซึ่งสลับแสงเป็นรายบุคคลบนจุดมืดของงานที่ยากที่สุด