Kinematics Teapots জন্য তাত্ত্বিক মেকানিক্স। স্ট্যাটিক - তাত্ত্বিক মেকানিক্স বিভাগ। আন্দোলন কি
Kinematics.
Kinematics উপাদান পয়েন্ট
তার আন্দোলনের নির্দিষ্ট সমীকরণ অনুযায়ী বিন্দু গতি এবং ত্বরণ নির্ধারণ
প্রদত্ত: ইঙ্গিত সমীকরণ: এক্স \u003d 12 পাপ (πt / 6), সেমি; y \u003d। 6 COS 2 (πT / 6), সেমি.
তার ট্রাজেক্টোরি দেখুন এবং সময় টি \u003d জন্য দেখুন 1 এস। ট্রাজেক্টোরি, তার গতি, সম্পূর্ণ, টানেন্ট এবং স্বাভাবিক ত্বরণ, সেইসাথে ট্রাজেক্টোরির বক্রতার ব্যাসার্ধের বিন্দু অবস্থানটি খুঁজুন।
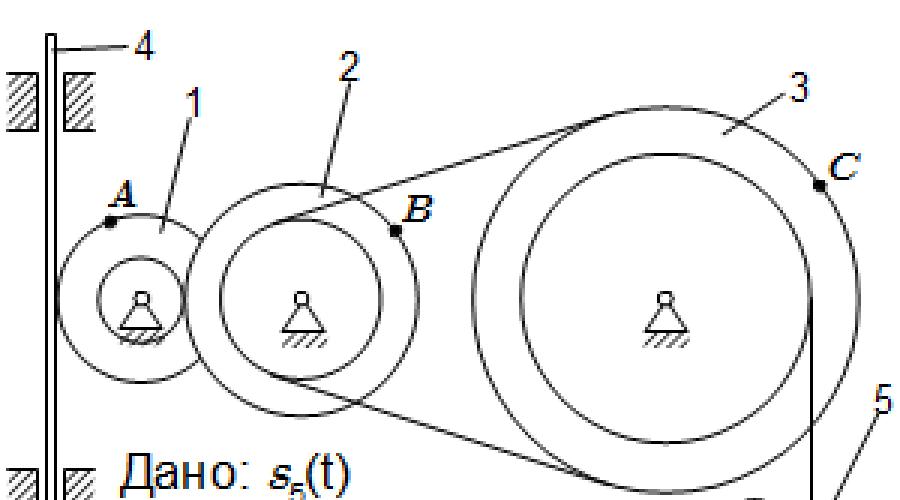
সারিবদ্ধকরণ এবং ঘূর্ণমান সংস্থা আন্দোলন

প্রদত্ত:
টি \u003d 2 গুলি; আর 1 \u003d ২ সেমি, আর 1 \u003d 4 সেমি; R 2 \u003d 6 সেমি, আর 2 \u003d 8 সেমি; আর 3 \u003d 12 সেমি, আর 3 \u003d 16 সেমি; এস 5 \u003d টি 3 - 6 টি (সেমি)।
টাইম টি \u003d 2 পয়েন্ট পয়েন্ট এ নির্ধারণ করুন, সি; চাকা এর কৌণিক ত্বরণ 3; অ্যাক্সিলেশন পয়েন্ট বি এবং র্যাক ত্বরণ 4।
ফ্ল্যাট প্রক্রিয়া kinematic বিশ্লেষণ

প্রদত্ত:
আর 1, আর ২, এল, এবি, ω 1।
খুঁজুন: ω 2।

ফ্ল্যাট প্রক্রিয়াটি একটি rods 1, 2, 3, 4 এবং একটি স্লাইডার ই ধারণ করে। Rods নলাকার hinges দ্বারা সংযুক্ত করা হয়। বিন্দু ডি AB রড মাঝখানে অবস্থিত।
Danched: ω 1, ε 1।
খুঁজুন: গতি ভি, ভি বি, ভি ডি এবং ভি ই; কৌণিক বেগ ω 2, ω 3 এবং ω 4; ত্বরণ একটি বি; কৌণিক ত্বরণ ε AB AB লিঙ্ক; তাত্ক্ষণিক বেগ সেন্টারের অবস্থান P 2 এবং P 3 লিঙ্ক 2 এবং 3 টি লিংক।
পরম গতি এবং বিন্দু পরম ত্বরণ নির্ধারণ

আয়তক্ষেত্রাকার প্লেট আইন দ্বারা স্টেশন অক্ষের কাছাকাছি ঘোরান φ \u003d 6 টি 2 - 3 টি 3 । কোণের ইতিবাচক রেফারেন্স দিক φ চাপুন তীরের আঁকাগুলিতে দেখানো হয়। ওও ঘূর্ণন অক্ষ 1 প্লেট সমতল মধ্যে মিথ্যা (প্লেট স্থান rotates)।
সরাসরি বিডি বরাবর প্লেট বরাবর, পয়েন্ট এম চলন্ত হয়। তার আপেক্ষিক আন্দোলনের আইন দেওয়া হয়, i.e. নির্ভরতা s \u003d am \u003d 40 (টি - 2 টি 3) - 40 (গুলি - সেন্টিমিটার, টি - সেকেন্ডে)। দূরত্ব বি \u003d। 20 সেমি। চিত্রটিতে, পয়েন্ট এমটি অবস্থানে দেখানো হয় যা এস \u003d am > 0 (এস এস এ< 0 পয়েন্ট এম বিন্দু একটি অন্য দিকে হয়)।
সময় টি সময়ে পরম গতি এবং পরম ত্বরণ বিন্দু মি 1 \u003d 1 গুলি.
গতিবিদ্যা
পরিবর্তনশীল বাহিনীর কর্মের অধীনে উপাদান বিন্দু গতির ডিফারেনশিয়াল সমীকরণ সংহত করা
কার্গো ডি ঝাঁকনি, পয়েন্ট A এ প্রাথমিক গত v 0 পেয়েছে, উল্লম্ব প্লেনে অবস্থিত বাঁকা এবিসি পাইপে চলে আসে। এবি বিভাগে, যার দৈর্ঘ্য, স্থায়ী শক্তি টি (এর নির্দেশনাটি চিত্রটিতে দেখানো হয়) এবং মাঝারি প্রতিরোধের শক্তি (এই শক্তিটির মডিউলটি R \u003d μV 2, ভেক্টর আর বিপরীত নির্দেশিত হয় লোড এর VELOCITY V)।
পণ্যসম্ভার, পাইপের বিন্দু বি এ, তার গতির মডিউলটির মান পরিবর্তন না করেই, এবি-সেকশন বি এ আন্দোলন শেষ করে, বিসি বিভাগে যায়। একটি পরিবর্তনশীল ফোর্স এফ পণ্যগুলিতে বিসি এলাকায় অপারেটিং হয়, প্রজেক্ট এফ এক্স যা এক্স অক্ষে সেট করা হয়।
পণ্যসম্ভার উপাদান বিবেচনা করে, বিসি প্লটের উপর আন্দোলনের আইনটি খুঁজে বের করুন, আই। এক্স \u003d f (টি), যেখানে x \u003d bd। পাইপ সম্পর্কে স্থল ঘর্ষণ উপেক্ষা।

সমাধান টাস্ক ডাউনলোড করুন
যান্ত্রিক সিস্টেমের গতিশীল শক্তিতে পরিবর্তনের উপর থিম
যান্ত্রিক ব্যবস্থার পণ্য 1 এবং 2, একটি নলাকার রিঙ্ক 3, দুই-পর্যায়ে pulleys 4 এবং 5. সিস্টেমের শরীরটি ছিনতাইয়ের উপর থ্রেডগুলির দ্বারা সংযুক্ত করা হয়; থ্রেড এর প্লট সংশ্লিষ্ট প্লেনে সমান্তরাল হয়। স্কেটিং রিঙ্ক (সলিড একক সিলিন্ডার) স্লাইডিং ছাড়া সমর্থন সমতল বরাবর রোলস। Pulleys 4 এবং 5 এর ব্যাসার্ধ যথাক্রমে 4 \u003d 0.3 মি, আর 4 \u003d 0.1 মি, আর 5 \u003d 0.2 মিটার, আর 5 \u003d 0.1 মিটার। প্রতিটি পশুর ভর সমানভাবে তার বহিরাগত রড দ্বারা সমানভাবে বিতরণ করা হয়। Cargo 1 এবং 2 রুক্ষ, প্রতিটি পণ্যসম্ভার f \u003d 0.1 জন্য ঘর্ষণ coefficient স্লাইডিং।
ফোর্স এফের আওতায়, আইনটি এফ \u003d f (গুলি) অনুসারে পরিবর্তিত হয়, যেখানে সেটি তার অ্যাপ্লিকেশনের বিন্দুতে যাচ্ছেন, সিস্টেমটি বাকি বাকি থেকে গতি আসে। যখন Pulleys সিস্টেমের 5 টি প্রতিরোধের শক্তি, যখন ঘূর্ণন অক্ষের সাথে সম্পর্কিত মুহূর্তটি স্থির এবং এম 5 এর সমান।
Pulley এর কৌণিক বেগের মান নির্ধারণ করুন 4 সেই সময়ে পপ অ্যাপ্লিকেশনের বিন্দুটির আন্দোলন এস 1 \u003d 1.2 মিটার সমান হয়ে উঠবে। 
সমাধান টাস্ক ডাউনলোড করুন
যান্ত্রিক সিস্টেমের গবেষণায় একটি সাধারণ গতিবিদ্যা সমীকরণ প্রয়োগ
রৈখিক ত্বরণ নির্ধারণ করার জন্য একটি যান্ত্রিক সিস্টেমের জন্য একটি 1। এটি অনুমান করা হয় যে ব্লক এবং রোলার ভর বাইরের ব্যাসার্ধের মাধ্যমে বিতরণ করা হয়। তারের এবং বেল্ট ওজনহীন এবং unrelaimed বিবেচনা করা হয়; Slock অনুপস্থিত। ঘূর্ণায়মান এবং ঘর্ষণ স্লিপ ঘর্ষণ উপেক্ষিত। 
সমাধান টাস্ক ডাউনলোড করুন
প্রচারণা শরীরের প্রতিক্রিয়া নির্ধারণের জন্য ডালাম্বার নীতির ব্যবহার সমর্থন করে
উল্লম্ব শাওয়ার AK, কৌণিক বেগ ω \u003d 10 C -1 এর সাথে সমানভাবে ঘূর্ণায়মান, স্পাইডারটি পয়েন্ট এ এবং বিন্দু ডি এ নলাকার ভারবহন দ্বারা স্থির করা হয়।
একটি ওজনহীন রড 1 এল 1 \u003d 0.3 মি শাফটের কাছে কঠোর হয়, যার মুক্ত শেষে এম 1 \u003d 4 কেজি, এবং একটি একক রড 2 এল 2 \u003d 0.6 মি দীর্ঘ, একটি ভর মি 2 \u003d 8 কেজি। উভয় rods একটি উল্লম্ব সমতল মধ্যে থাকা। শাফ্টে rods সংযুক্ত করার পয়েন্ট, পাশাপাশি কোণ α এবং β টেবিলে নির্দেশিত হয়। DIMENSIONS AB \u003d BD \u003d DE \u003d EK \u003d B, যেখানে B \u003d 0.4 মি। পণ্যসম্ভার একটি উপাদান বিন্দু নিতে।
Shaft ভর অবহেলা, স্ক্যাপার এবং ভারবহন প্রতিক্রিয়া নির্ধারণ।

Kinematics বিন্দু।
1. তাত্ত্বিক মেকানিক্স বিষয়। মৌলিক বিমূর্ততা।
তাত্ত্বিক মেকানিক্স- এটি একটি বিজ্ঞান যা যান্ত্রিক আন্দোলনের সাধারণ আইন এবং উপাদান সংস্থাগুলির যান্ত্রিক মিথস্ক্রিয়া অধ্যয়ন করা হচ্ছে
যান্ত্রিক আন্দোলন এটি স্থান এবং সময় ঘটছে অন্য শরীরের আপেক্ষিক শরীরের আন্দোলন বলা হয়।
যান্ত্রিক মিথস্ক্রিয়া এটি উপাদান সংস্থাগুলির যেমন মিথস্ক্রিয়া বলা হয়, যা তাদের যান্ত্রিক আন্দোলনের প্রকৃতির পরিবর্তন করে।
পরিসংখ্যান - এটি তাত্ত্বিক মেকানিক্সের একটি বিভাগ, যা সমতুল্য সিস্টেমে শক্তি সিস্টেমের রূপান্তরের পদ্ধতিগুলি গবেষণা করে এবং কঠিন শরীরের সাথে সংযুক্ত ভারসাম্যহীন অবস্থার স্থাপন করে।
Kinematics. - অধ্যয়ন করা হয় তাত্ত্বিক মেকানিক্স এই বিভাগে তাদের উপর অভিনয় বাহিনী নির্বিশেষে, একটি জ্যামিতিক দৃষ্টিকোণ থেকে স্থান উপাদান উপাদান আন্দোলন।
গতিবিদ্যা - এটি মেকানিক্সের একটি বিভাগ যা স্থানগুলিতে বস্তুর দেহের আন্দোলন তাদের উপর অভিনয় করার উপর নির্ভর করে গবেষণা করা হয়।
তাত্ত্বিক মেকানিক্স অধ্যয়ন বস্তু:
উপাদান বিন্দু,
উপাদান ডট সিস্টেম
একেবারে কঠিন শরীর।
পরম স্থান এবং পরম সময় অন্য এক স্বাধীন এক। পরম স্থান - ত্রিমাত্রিক, একক, স্থিতিশীল ইউক্লিডিয়ান স্থান। পরম সময় - অতীত থেকে অতীত থেকে ক্রমাগত প্রবাহিত, এটি সমানভাবে, সমানভাবে, সমানভাবে সমস্ত পয়েন্টে এবং বিষয়টির আন্দোলনের উপর নির্ভর করে না।
2. Kinematics বিষয়।
Kinematics - যান্ত্রিকতার এই অধ্যায়টি, যার মধ্যে মৃতদেহের আন্দোলনের জ্যামিতিক বৈশিষ্ট্যগুলি তাদের জ্যামিতিক বৈশিষ্ট্যগুলি (অর্থাৎ, জনসাধারণের) এবং তাদের উপর অভিনয় না করেই অধ্যয়ন করা হয়
এই শরীরের সাথে চলমান শরীর (বা বিন্দু) এর অবস্থান নির্ধারণ করতে, যার সাথে এই শরীরের আন্দোলন অধ্যয়ন করা হয়, কঠোরভাবে, শরীরের সাথে একত্রিত করে এমন কিছু সমন্বয় সিস্টেমটি আবদ্ধ করে রেফারেন্স সিস্টেম।
Kinematics প্রধান কাজ এটি এই শরীরের (বিন্দু) আন্দোলনের আইনটিকে জানাতে, তার আন্দোলন (গতি এবং ত্বরণ) চিহ্নিত করা সমস্ত কিনিম্যাটিক মান নির্ধারণের জন্য।
3. একটি বিন্দু আন্দোলন সেট করার উপায়
· প্রাকৃতিক উপায়
এটা পরিচিত করা উচিত:
ট্রাজেক্টরি গতি পয়েন্ট;
শুরু এবং রেফারেন্স দিক;
ফর্মের একটি নির্দিষ্ট ট্রাজেক্টোরি অনুযায়ী বিন্দু আন্দোলনের আইন (1.1)
· সমন্বয় পদ্ধতি
সমীকরণ (1.2) - এম এর গতি সমীকরণ।
সময় প্যারামিটার বাদে বিন্দু এম এর ট্রাজেক্টোরি সমীকরণ প্রাপ্ত করা যেতে পারে « টি। » সমীকরণ থেকে (1.2)
· ভেক্টর ফ্যাশন
|
|
(1.3) বিন্দু আন্দোলনের বিন্দু সমন্বয় এবং ভেক্টর পদ্ধতির মধ্যে যোগাযোগ
|

লক্ষ্য ট্রাফিক সমন্বয় এবং প্রাকৃতিক উপায় মধ্যে যোগাযোগ
সমীকরণ থেকে সময় বাদে বিন্দু পথ নির্ধারণ করুন (1.2);
-- ট্রাজেক্টোরি বরাবর বিন্দু গতির আইনটি খুঁজুন (একটি চাপের ডিফারেনশিয়ালের জন্য একটি অভিব্যক্তিটি ব্যবহার করুন)
ইন্টিগ্রেশন করার পরে, আমরা একটি নির্দিষ্ট ট্রাজেক্টোরি অনুযায়ী বিন্দু আন্দোলনের আইন পেতে পারি:
বিন্দু আন্দোলনের বিন্দু এর সমন্বয় এবং ভেক্টর পদ্ধতির মধ্যে সম্পর্ক সমীকরণ দ্বারা নির্ধারিত হয় (1.4)
4. আন্দোলন স্থাপনের ভেক্টর পদ্ধতিতে বিন্দুটির গতি নির্ধারণ করা।
সময় সময় যাকটি।বিন্দু অবস্থান ব্যাসার্ধ-ভেক্টর দ্বারা নির্ধারিত হয়, এবং সময় সময়েটি। 1
- ব্যাসার্ধ-ভেক্টর, তারপর সময়ের সাথে সাথে ![]() বিন্দু সরানো হবে।
বিন্দু সরানো হবে।
|
|
বিন্দু গড় বিন্দু, নির্দেশিত ভেক্টর পাশাপাশি ভেক্টর
|

 (1.5)
(1.5)
একটি নির্দিষ্ট সময়ে পয়েন্ট পয়েন্ট
মুহূর্তে বিন্দু গতি পেতে, এটি একটি সীমা করা প্রয়োজন
 (1.6)
(1.6)
(1.7)
বর্তমান সময়ে পয়েন্ট গতি ভেক্টর এটি সময়ের মধ্যে ব্যাসার্ধ-ভেক্টরের প্রথম ডেরিভেটিভের সমান এবং এই মুহুর্তে ট্রাজেক্টোরিটিতে ট্যানজেন্টের লক্ষ্য ছিল।
(ইউনিট¾ এম / এস, কিমি / এইচ)
ভেক্টর মধ্য ত্বরণ ভেক্টর হিসাবে একই দিক আছেΔ ভি। যে, অভিঘাত অগ্রগতি দিকে লক্ষ্য করা হয়।
একটি নির্দিষ্ট সময় ভেক্টর ত্বরণ বিন্দু এটি বেগ ভেক্টরের প্রথম ডেরিভেটিভ বা সময়ের মধ্যে ব্যাসার্ধ-ভেক্টর বিন্দু দ্বিতীয় ডেরিভেটিভের সমান।
(পরিমাপের একক -)
কিভাবে ট্রাজেক্টরি বিন্দু সম্পর্কিত ভেক্টর হয়?
Rectilinear গতি সঙ্গে, ভেক্টর সরাসরি বরাবর নির্দেশিত হয়, যা বিন্দু সরানো। যদি পাথ ট্রাজেক্টোরি একটি সমতল বক্ররেখা হয়, তবে ত্বরণের গতি, সেইসাথে বুধবার ভেক্টরটি এই বক্ররেখাটির প্লেনে অবস্থিত এবং তার সংঘর্ষের দিকে পরিচালিত হয়। যদি ট্রাজেক্টোরিটি একটি ফ্ল্যাট বক্র না থাকে তবে সিপিটির ভেক্টরটি ট্রাজেক্টোরির অগ্রগতির দিকে পরিচালিত হবে এবং এই প্রান্তে ট্রাজেক্টোরির দিকে যাওয়ার মাধ্যমে বিমানটিতে থাকা বিমানটিতে থাকা হবেএম। এবং সোজা, পরবর্তী সময়ে সমান্তরাল টানেন্টএম 1। . ভিতরে বিন্দু যখন সীমাএম 1। আলোচনা করা হয়েছে এম। এই সমতল তথাকথিত স্পর্শ সমতল অবস্থান দখল করে। অতএব, সাধারণ ক্ষেত্রে, অ্যাক্সিলেশন ভেক্টর স্পর্শ প্লেনে অবস্থিত এবং বক্ররেখার আমানতের দিকে পরিচালিত হয়।
শরীরের সিস্টেমের স্পিকার সাধারণ তত্ত্ব। আন্দোলনের পরিমাণ পরিবর্তন, আন্দোলনের পরিমাণ পরিবর্তন সম্পর্কে, আন্দোলনের পরিমাণ পরিবর্তন সম্পর্কে, গতিশীল শক্তি পরিবর্তন করার বিষয়ে আন্দোলনের পরিমাণ পরিবর্তন করার বিষয়ে তত্ত্ব। ডালামবার্ট, এবং সম্ভাব্য আন্দোলনের নীতি। স্পিকার সাধারণ সমীকরণ। Lagrange সমীকরণ।
কন্টেন্টক্ষমতা যে কাজ করে তোলে শক্তি ভেক্টরগুলির SCALAR পণ্য এবং এর আবেদনটির বিন্দুতে অসীম ক্ষুদ্র আন্দোলনের সমান:
,
অর্থাৎ, তাদের মধ্যে কোণের কোসাইনে F এবং DS ভেক্টরগুলির মডিউলগুলির পণ্য।
বাহিনী যে মুহূর্ত কাজ টর্কে ভেক্টরগুলির স্কেলার পণ্য এবং ঘূর্ণনটির একটি অসীম ছোট কোণের সমান:
.
ডালাম্বার নীতি
ডালাম্বার নীতির মূল বিষয়টি স্ট্যাটিক কাজগুলি হ্রাস করার জন্য স্পিকারদের কাজ করা। এর জন্য, এটি অনুমিত হয় (অথবা এটি অগ্রিম জানা যায়) যে সিস্টেমের শরীরটি নির্দিষ্ট (কৌণিক) ত্বরণ রয়েছে। পরবর্তী, জরায়ু এবং (অথবা) জরায়ু বাহিনীর সমান এবং বাহিনীর বাহিনী এবং মুহুর্তের দিকের দিকে বিপরীত, যা আকারের এবং মুহুর্তের দিকে বিপরীত, যা, মেকানিক্সের আইন অনুসারে, নির্দিষ্ট অ্যাক্সিলারেশনগুলি তৈরি করবে। কৌণিক accelerations.
একটি উদাহরণ বিবেচনা করুন। শরীরের পথ অনুবাদমূলক আন্দোলন এবং বহিরাগত বাহিনী এটি কাজ করে। পরবর্তীতে, আমরা অনুমান করি যে এই বাহিনী ভর ব্যবস্থার কেন্দ্রের ত্বরণ তৈরি করে। জনগণের কেন্দ্রের আন্দোলনে থিওরিমের মতে, শরীরের গণহত্যাটি একই ত্বরণ হবে, যদি শরীরের উপর ক্ষমতা পরিচালিত হয়। এরপর, আমরা জরায়ুর শক্তি পরিচয় করিয়ে দিয়েছি:
.
তারপরে, স্পিকারের টাস্ক:
.
;
.
ঘূর্ণমান গতি জন্য একই ভাবে আসে। শরীরটি z অক্ষের চারপাশে ঘুরতে দিন এবং এটির জন্য এম ই ZK এর বাহ্যিক মুহুর্তগুলি রয়েছে। আমরা অনুমান করি যে এই মুহুর্তগুলি একটি কৌণিক ত্বরণ ε z তৈরি করে। পরবর্তীতে, আমরা ইন্টিয়া এর বাহিনী এম এবং \u003d - জে z ε z এর মুহূর্তটি পরিচয় করিয়ে দিচ্ছি। তারপরে, স্পিকারের টাস্ক:
.
স্ট্যাটিক টাস্ক মধ্যে সক্রিয়:
;
.
সম্ভাব্য আন্দোলনের নীতি
সম্ভাব্য আন্দোলনের নীতিটি স্ট্যাটিকস টাস্কগুলি সমাধান করার জন্য ব্যবহৃত হয়। কিছু কাজে, সমীকরণ সমীকরণগুলি আঁকতে এটি একটি সংক্ষিপ্ত সমাধান দেয়। এটি বিশেষ করে সংযোগগুলির সাথে সিস্টেমের জন্য সত্য (উদাহরণস্বরূপ, থ্রেড এবং ব্লক দ্বারা সংযুক্ত সংস্থাগুলি) অনেক সংস্থা গঠিত।
সম্ভাব্য আন্দোলনের নীতি.
আদর্শ বন্ডের সাথে যান্ত্রিক ব্যবস্থার ভারসাম্যগুলির জন্য, এটি প্রয়োজনীয় এবং কোনও সম্ভাব্য সিস্টেমের আন্দোলনের সাথে কাজ করে এমন সমস্ত সক্রিয় শক্তির প্রাথমিক কাজটির সমষ্টি শূন্য ছিল।
সিস্টেমের সম্ভাব্য আন্দোলন - এটি একটি ছোট আন্দোলন যা সিস্টেমে আরোপিত সংযোগগুলি লঙ্ঘন করা হয় না।
আদর্শ সংযোগ - এই সংযোগগুলি এমন সংযোগগুলি যা সিস্টেমটি সরানোর সময় কাজ করে না। আরো সঠিকভাবে, সিস্টেমটি চলছে যখন সংযোগ দ্বারা সঞ্চালিত কাজ পরিমাণ শূন্য হয়।
স্পিকার সাধারণ সমীকরণ (ডালাম্বার এর নীতি - Lagrange)
ডালাম্বারের নীতি - Lagrange সম্ভাব্য আন্দোলনের নীতির সাথে ডালাম্বার্টের নীতির সমিতি। অর্থাৎ, গতিশীলতার সমস্যা সমাধানের সময়, আমরা ইন্ট্রিয়া বাহিনী পরিচয় করিয়ে এবং সম্ভাব্য আন্দোলনের নীতির সাহায্যে আমরা যে স্ট্যাটিক্সগুলির সমাধান করি তা হ্রাস করি।
ডালাম্বার এর নীতি - Lagrange.
সময় প্রতিটি মুহুর্তে আদর্শ বন্ডের সাথে যান্ত্রিক সিস্টেমটি সরানোর সময়, সমস্ত সংযুক্ত সক্রিয় শক্তির প্রাথমিক কাজ এবং সিস্টেমের যে কোনও সম্ভাব্য আন্দোলনের সমস্ত নিষ্ক্রিয় শক্তির সমষ্টি শূন্য:
.
এই সমীকরণ বলা হয় স্পিকার সামগ্রিক সমীকরণ.
Lagrange সমীকরণ
জেনারাইজড সমন্বয় Q. 1, প্রশ্ন 2, ..., প্রশ্ন এন - এটি এন মানগুলির একটি সমন্বয় যা নির্বিচারে সিস্টেমের অবস্থান নির্ধারণ করে।
জেনারেলাইজড কোঅর্ডিনেটসের সংখ্যাটি সিস্টেমের স্বাধীনতার ডিগ্রীগুলির সাথে মিলে যায়।
সাধারণ গতি - এই সময় সাধারণ সমন্বয় থেকে প্রাপ্ত হয়।
সাধারণ বাহিনী প্রশ্নঃ 1, প্রশ্ন 2, ..., প্রশ্ন এন
.
সিস্টেমের সম্ভাব্য আন্দোলনকে বিবেচনা করুন, যার মধ্যে সমন্বয়কারী কুই কে এই আন্দোলন পাবেন δQ কে। অবশিষ্ট coordinates অপরিবর্তিত থাকা। Δa কে যেমন একটি পদক্ষেপ সঙ্গে বহিরাগত বাহিনী দ্বারা সঞ্চালিত কাজ হতে দিন। তারপর
Δa কে \u003d q কে δq কে, বা
.
যদি, সিস্টেমের সম্ভাব্য আন্দোলনের সাথে, সমস্ত সমন্বয়গুলি পরিবর্তিত হয়, বহিরাগত বাহিনী দ্বারা এই ধরনের পদক্ষেপের সাথে সম্পাদন করা কাজটি ফর্মটি রয়েছে:
Δa \u003d q. 1 δq 1 + প্রশ্ন 2 δq 2 + ... q এন δq এন.
তারপর সাধারণকরণ বাহিনী আন্দোলনের কাজ থেকে আংশিক ডেরিভেটিভস হয়:
.
সম্ভাব্য বাহিনীর জন্য সম্ভাব্য সঙ্গে π,
.
Lagrange সমীকরণ - এই সাধারণ সমন্বয়কারী যান্ত্রিক ব্যবস্থার সমীকরণগুলি:
এখানে টি টিটিক শক্তি। এটি সাধারণকরণ সমন্বয়কারী, গতি এবং, সম্ভবত, সময় একটি ফাংশন। অতএব, তার ব্যক্তিগত ডেরিভেটিভ এছাড়াও সাধারণ সমন্বয়কারী, গতি এবং সময় একটি ফাংশন। পরবর্তীতে, সমন্বয় ও গতি সময়সীমার কাজগুলি বিবেচনা করা দরকার। অতএব, সময়ের মধ্যে একটি সম্পূর্ণ ডেরিভেটিভ খুঁজে পেতে, আপনাকে একটি জটিল ফাংশনের পার্থক্য নিয়ম প্রয়োগ করতে হবে:
.
রেফারেন্স:
এস। এমআরএস, তাত্ত্বিক মেকানিক্সের একটি সংক্ষিপ্ত কোর্স, "উচ্চ বিদ্যালয়", ২010।
কোর্সটি বিবেচনা করা হয়: বিন্দু এবং কঠিন শরীরের kinematics (এবং বিভিন্ন দৃষ্টিভঙ্গি থেকে, এটি একটি কঠিন অভিযোজন সমস্যা বিবেচনা করার প্রস্তাব করা হয়), যান্ত্রিক সিস্টেম এবং কঠিন শরীরের গতিবিদ্যা এর গতিবিদ্যা এর শাস্ত্রীয় কাজ, আক্ষরিক মেকানিক্সের উপাদানগুলি, পরিবর্তনশীল রচনা সিস্টেমের আন্দোলন, প্রভাব তত্ত্ব, বিশ্লেষণাত্মক গতিবিদ্যা এর ডিফারেনশিয়াল সমীকরণ।
তাত্ত্বিক মেকানিক্সের সমস্ত ঐতিহ্যবাহী বিভাগগুলি উপস্থাপন করা হয়েছে, তবে বিশ্লেষণ এবং বিশ্লেষণাত্মক মেকানিক্সের পদ্ধতিগুলির তত্ত্ব এবং অ্যাপ্লিকেশনগুলির জন্য সবচেয়ে তথ্যপূর্ণ এবং মূল্যবান বিবেচনায় বিশেষ মনোযোগ দেওয়া হয়; স্ট্যাটিক্স স্পিকারের একটি বিভাগ হিসাবে গবেষণা করা হয়, এবং Kinematics বিভাগে, ধারণা এবং গাণিতিক যন্ত্রপাতি বিস্তারিতভাবে চালু করা হয়।
তথ্যমূলক সম্পদ
Gantmakher F.R. বিশ্লেষণাত্মক মেকানিক্স উপর বক্তৃতা। - 3 য় ইডি। - এম।: Fizmatlit, 2001।
Zhuravleov v.f. তাত্ত্বিক মেকানিক্স এর মৌলিক। - দ্বিতীয় ইডি। - এম।: Fizmatlit, 2001; 3 য় ইডি। - এম।: Fizmatlit, 2008।
Markeev A.P. তাত্ত্বিক মেকানিক্স। - মস্কো - ইজহেভস্ক: এনআইসি "নিয়মিত এবং বিশৃঙ্খল ডাইনামিকস", 2007।
প্রয়োজনীয়তা
কোর্সটি প্রযুক্তিগত বিশ্ববিদ্যালয়ের প্রথম কোর্সের সুযোগে বিশ্লেষণাত্মক জ্যামিতি এবং লিনিয়ার বীজগণিতের মালিকদের জন্য ডিজাইন করা হয়েছে।
কোর্স প্রোগ্রাম
1. Kinematics পয়েন্ট
1.1। Kinematics কাজ। Decartova সমন্বয় সিস্টেম। Orthonormal ভিত্তিতে দ্বারা ভেক্টর decomposition। ব্যাসার্ধ ভেক্টর এবং বিন্দু সমন্বয়। গতি এবং ত্বরণ বিন্দু। আন্দোলনের যাত্রা।
1.2। প্রাকৃতিক ট্রিগার। একটি প্রাকৃতিক তিন-খাঁটি (Guigens থিওরিম) এর অক্ষে গতি এবং ত্বরণের বিনিময়ে।
1.3। বিন্দু এর বাঁকা সমন্বয়, উদাহরণ: পোলার, নলাকার এবং গোলাকার সমন্বয় সিস্টেম। উপাদান এবং curvilinear সমন্বয় সিস্টেমের অক্ষ উপর ত্বরণ এর অভিক্ষেপ।
2. একটি কঠিন শরীরের অভিযোজন সেট করার উপায়
2.1। কঠিন। স্থায়ী এবং বাঁধাই সমন্বয় সিস্টেম।
2.2। Orthogonal ম্যাট্রিক্স এবং তাদের বৈশিষ্ট্য চালু। চূড়ান্ত পালা সম্পর্কে EULER তত্ত্ব।
2.3। Orthogonal রূপান্তর উপর সক্রিয় এবং প্যাসিভ পয়েন্ট। সক্রিয় ছাড়াও।
2.4। সীমাবদ্ধ ঘূর্ণন কোণ: EULER এবং "বিমান" কোণ কোণ। সীমাবদ্ধ ঘূর্ণন কোণের মাধ্যমে Orthogonal ম্যাট্রিক্স এর অভিব্যক্তি।
3. কঠিন স্থানিক আন্দোলন
3.1। একটি কঠিন শরীরের প্রতিরক্ষামূলক এবং ঘূর্ণমান গতি। কোণার গতি এবং কৌণিক ত্বরণ।
3.2। VELOCETIES বিতরণ (EULER FORMULA) এবং কঠিন বিন্দুগুলির অ্যাক্সিলারেশন (প্রতিদ্বন্দ্বী সূত্র)।
3.3। Kinematic invariants। Kinematic স্ক্রু। তাত্ক্ষণিক স্ক্রু অক্ষ।
4. সমতল সমান্তরাল গতি
4.1। সমতল সমান্তরাল শরীরের আন্দোলনের ধারণা। একটি সমতল সমান্তরাল আন্দোলনের ক্ষেত্রে কোণার গতি এবং কৌণিক ত্বরণ। তাত্ক্ষণিক গতি কেন্দ্র।
5. বিন্দু এবং কঠিন শরীরের জটিল আন্দোলন
5.1। স্থায়ী এবং চলন্ত সমন্বয় সিস্টেম। পরম, আপেক্ষিক এবং পোর্টেবল পয়েন্ট আন্দোলন।
5.2। বিন্দু, আপেক্ষিক এবং পোর্টেবল পয়েন্ট গতির একটি জটিল আন্দোলনের সাথে গতি বাড়ানোর বিষয়ে তত্ত্ব। বিন্দু, আপেক্ষিক, পোর্টেবল এবং coriolis ত্বরণ বিন্দু একটি জটিল আন্দোলনের সঙ্গে ত্বরান্বিতকরণ যোগ করার উপর coriolis তত্ত্ব।
5.3। পরম, আপেক্ষিক এবং পোর্টেবল কৌণিক বেগ এবং শরীরের কৌণিক ত্বরণ।
6. নির্দিষ্ট বিন্দু সঙ্গে কঠিন গতি (Quaternion উপস্থাপনা)
6.1। জটিল এবং hypercomplexplex সংখ্যা ধারণা। বীজগণিত quaternions। Quaternion কাজ। Contamed এবং বিপরীত quaternion, আদর্শ এবং মডিউল।
6.2। একক quaternion trigonometric উপস্থাপনা। শরীরের পালা সেট করার জন্য quaternion উপায়। চূড়ান্ত পালা সম্পর্কে EULER তত্ত্ব।
6.3। বিভিন্ন ঘাঁটিতে quaternion উপাদান মধ্যে যোগাযোগ। সক্রিয় ছাড়াও। প্যারামিটার রড্রিগা হ্যামিলটন।
7. পরীক্ষা কাজ
8. গতিবিদ্যা মৌলিক ধারণা।
8.1 পালস, আবেগের মুহূর্ত (kinetic মুহূর্ত), গতিবিধি শক্তি।
8.2 শক্তি শক্তি, কাজ প্রচেষ্টা, সম্ভাব্য এবং পূর্ণ শক্তি।
8.3 ভর কেন্দ্র (জরায়ু) সিস্টেম। অক্ষের আপেক্ষিক সিস্টেমের জরায়ুর মুহূর্ত।
8.4 সমান্তরাল অক্ষের আপেক্ষিকের মধ্যে জরায়ুর মুহূর্ত; Guiggens-steiner থিওরেম।
8.5 ট্রেন্সর এবং এলিপসিওড জরায়ু। জরায়ুর প্রধান axes। অক্ষীয় মুহুর্তের বৈশিষ্ট্য।
8.6 ইম্পুলেশন এবং গতিশীল শরীরের শক্তির মুহূর্তের হিসাবটি জরায়ু।
9. প্রধান স্পিকার তত্ত্ব inertial এবং অ-নিষ্ক্রিয় রেফারেন্স সিস্টেমে।
9.1 নিয়ন্ত্রক রেফারেন্স সিস্টেমে সিস্টেমে পরিবর্তনের উপর থিম। ভর কেন্দ্রের আন্দোলনে থিওরেম।
9.2 নিয়মিত রেফারেন্স সিস্টেমে সিস্টেমের পালনের মুহূর্ত পরিবর্তন করার বিষয়ে তত্ত্ব।
9.3 প্রারম্ভিক রেফারেন্স সিস্টেমে সিস্টেমের গতিশীল শক্তিতে পরিবর্তনের উপর থিম।
9.4 সম্ভাব্য, Gyroscopic এবং dissipative বাহিনী।
9.5 অ-নিষ্ক্রিয় রেফারেন্স সিস্টেমে প্রধান স্পিকার তত্ত্ব।
10. জরায়ু দ্বারা একটি নির্দিষ্ট বিন্দু সঙ্গে একটি কঠিন শরীরের আন্দোলন।
10.1 ডাইনামিক ইউুলার সমীকরণ।
10.2 EULER কেস, গতিশীল সমীকরণের প্রথম অবিচ্ছেদ্য; স্থায়ী ঘূর্ণন।
10.3 পোনাসো এবং ম্যাককোললের ব্যাখ্যা।
10.4 শরীরের ডাইনামিক সমান্তরাল ক্ষেত্রে নিয়মিত পূর্ববর্তী।
11. একটি নির্দিষ্ট বিন্দু সঙ্গে ভারী কঠিন শরীরের আন্দোলন।
11.1 সাধারণ একটি ভারী কঠিন আন্দোলনের সমস্যা নির্ধারণ।
নির্দিষ্ট বিন্দু. ডাইনামিক ইউুলার সমীকরণ এবং তাদের প্রথম অবিচ্ছেদ্য।
11.2 Lagrange ক্ষেত্রে কঠিন আন্দোলনের গুণগত বিশ্লেষণ।
11.3 একটি গতিশীলভাবে সমার্থক কঠিন শরীরের বাধ্যতামূলক নিয়মিত পূর্ববর্তী।
11.4 বেসিক Gyroscopy সূত্র।
11.5 Gyroscopes প্রাথমিক তত্ত্ব ধারণা।
12. কেন্দ্রীয় ক্ষেত্রে পয়েন্ট গতিবিদ্যা।
12.1 বিনা সমীকরণ।
12.2 Orbita সমীকরণ। কেপলার আইন।
12.3 বিক্ষিপ্ত টাস্ক।
12.4 টাস্ক দুই টেলিফোন। গতি সমীকরণ। বর্গক্ষেত্র অবিচ্ছেদ্য, অবিচ্ছেদ্য শক্তি, laplace অবিচ্ছেদ্য।
13. পরিবর্তনশীল রচনা সিস্টেমের ডাইনামিক্স।
13.1 পরিবর্তনশীল রচনা সিস্টেমে মৌলিক গতিশীল মানগুলি পরিবর্তন করার মূল ধারণা এবং তত্ত্বগুলি।
13.2 উপাদান পরিবর্তনশীল ভর গতি।
13.3 পরিবর্তনশীল রচনা শরীরের গতি সমীকরণ।
14. impulsive আন্দোলনের তত্ত্ব।
14.1 মৌলিক ধারণা এবং impulsive আন্দোলনের axioms।
14.2 থিওরেস অনাক্রম্যতা গতিতে মৌলিক গতিশীল মান পরিবর্তন উপর।
14.3 impulsive ফার্মওয়্যার আন্দোলন।
14.4 দুই দৃঢ় সংস্থাগুলির সংঘর্ষ।
14.5 কার্নো এর তত্ত্ব।
15. পরীক্ষা
শেখার ফলাফল
শৃঙ্খলা উন্নয়নের ফলে ছাত্রটি অবশ্যই:
- জানুন:
- মেকানিক্সের প্রধান ধারণা এবং তত্ত্ব এবং তাদের কাছ থেকে উদ্ভূত যান্ত্রিক ব্যবস্থার আন্দোলন অধ্যয়ন করার পদ্ধতি;
- করতে পারবেন:
- সঠিকভাবে তাত্ত্বিক মেকানিক্স পদে সমস্যা প্রণয়ন;
- মেকানিক্যাল এবং গাণিতিক মডেলগুলি বিকাশ করুন, পর্যাপ্তভাবে ঘটনাটির মৌলিক বৈশিষ্ট্যগুলি বিবেচনায় প্রতিফলিত করা;
- সংশ্লিষ্ট নির্দিষ্ট কাজ সমাধানের জন্য প্রাপ্ত জ্ঞান প্রয়োগ করুন;
- নিজস্ব:
- তাত্ত্বিক মেকানিক্স এবং গণিত শাস্ত্রীয় সমস্যা সমাধানের দক্ষতা;
- মেকানিক্সের সমস্যাগুলি অধ্যয়ন করতে এবং যান্ত্রিক ও গাণিতিক মডেলগুলি তৈরি করার দক্ষতা যা পর্যাপ্ত পরিমাণে যান্ত্রিক ঘটনা বর্ণনা করে;
- সমস্যা সমাধানে তাত্ত্বিক মেকানিক্সের পদ্ধতি এবং নীতির ব্যবহারিক ব্যবহারের দক্ষতা: পাওয়ার গণনা, আন্দোলন সেট করার বিভিন্ন উপায়ে শরীরের কিনিম্যাটিক বৈশিষ্ট্যগুলি নির্ধারণ করে, বস্তুর অধীনে বস্তুগত সংস্থা এবং যান্ত্রিক ব্যবস্থার ব্যবস্থা নির্ধারণ করে বাহিনী;
- দক্ষতা এবং আধুনিক শিক্ষা ও তথ্য প্রযুক্তি ব্যবহার করে শিল্প ও বৈজ্ঞানিক ক্রিয়াকলাপের প্রক্রিয়াতে নতুন তথ্যের দক্ষতা অর্জন করে;
কোন প্রশিক্ষণ কোর্সের কাঠামোর মধ্যে, পদার্থবিজ্ঞানের গবেষণা মেকানিক্সের সাথে শুরু হয়। তাত্ত্বিক সঙ্গে না, প্রয়োগ না এবং কম্পিউটিং না, কিন্তু পুরানো ভাল শাস্ত্রীয় মেকানিক্স সঙ্গে। এই মেকানিক্স এছাড়াও নিউটন মেকানিক্স বলা হয়। কিংবদন্তীর মতে, বিজ্ঞানী বাগানের চারপাশে ঘুরে বেড়ালেন, অ্যাপলটি পড়েছিল, এবং এটি ছিল এই ঘটনাটি যা তাকে বিশ্বব্যাপী বিশ্বকে খোলার দিকে ঠেলে দিয়েছিল। অবশ্যই, আইন সর্বদা বিদ্যমান ছিল, এবং নিউটন শুধুমাত্র তাকে একটি ফর্ম-বোধগম্য ফর্ম দিয়েছেন, কিন্তু তার যোগ্যতা মূল্যবান। এই প্রবন্ধে, আমরা সম্ভাব্য সর্বাধিক বিস্তারিতভাবে নিউটনীয় মেকানিক্সের আইনগুলি আঁকতে পারব না, কিন্তু বুনিয়াদি, মৌলিক জ্ঞান, সংজ্ঞা এবং সূত্রগুলি যা আপনার হাতে সবসময় খেলতে পারে।
মেকানিক্স - পদার্থবিজ্ঞান বিভাগ, বিজ্ঞান বস্তুগত সংস্থা এবং তাদের মধ্যে মিথস্ক্রিয়া আন্দোলন অধ্যয়নরত।
শব্দটি নিজেই একটি গ্রিক উত্স এবং "আর্ট বিল্ডিং মেশিন" হিসাবে অনুবাদ করে। কিন্তু গাড়ি তৈরী করার আগে, আমরা এখনও চাঁদকে পছন্দ করি, তাই আসুন আমরা আমাদের পূর্বপুরুষদের পদচিহ্নে যাই, এবং আমরা দিগন্তের কোণে নিক্ষিপ্ত পাথরের আন্দোলন অধ্যয়ন করব, এবং উচ্চতা থেকে মাথার উপর মাথার উপর পড়ে থাকা আপেলগুলি হ'ল।

কেন পদার্থবিদ্যা গবেষণা মেকানিক্স সঙ্গে শুরু হয়? কারণ এটি সম্পূর্ণ প্রাকৃতিক, এটি শুরু করার জন্য থার্মোডাইনামিক ভারসাম্য থেকে নয়?!
মেকানিক্স প্রাচীনতম বিজ্ঞানগুলির মধ্যে একটি, এবং ঐতিহাসিকভাবে গবেষণার বুনিয়াদিগুলির সাথে শুরু হয়। সময় এবং স্থান কাঠামোর মধ্যে স্থাপন করা, মানুষ, আসলে, সব ইচ্ছা সঙ্গে, অন্য কিছু দিয়ে শুরু করতে পারে না। চলন্ত সংস্থা - প্রথম জিনিস আমরা আপনার মনোযোগ দিতে।
আন্দোলন কি?
যান্ত্রিক আন্দোলন সময়ের সাথে সাথে আপেক্ষিক স্থানগুলির মধ্যে মৃতদেহের অবস্থানের মধ্যে একটি পরিবর্তন।
এই সংজ্ঞাটির পরে আমরা সম্পূর্ণরূপে স্বাভাবিকভাবেই রেফারেন্স সিস্টেমের ধারণাতে আসি। একে অপরের আপেক্ষিক স্থান মধ্যে মৃতদেহ অবস্থান পরিবর্তন। এখানে কীওয়ার্ড: একে অপরের আপেক্ষিক । সর্বোপরি, গাড়ীর যাত্রী একটি নির্দিষ্ট গতিতে একজন ব্যক্তির পাশে তুলনামূলকভাবে দাঁড়িয়ে থাকে এবং তার প্রতিবেশীর কাছে কাছাকাছি আসনটিতে থাকে এবং তাদেরকে অতিক্রমকারী গাড়ীতে যাত্রীকে কিছু অন্যান্য গতির সাথে চলতে থাকে।

এ কারণে, সাধারণত চলন্ত বস্তুর প্যারামিটারগুলি পরিমাপ করার জন্য এবং বিভ্রান্ত না করার জন্য, আমাদের দরকার রেফারেন্স সিস্টেম কঠোরভাবে সম্পর্কিত গণনা, সমন্বয় সিস্টেম এবং ঘড়ি। উদাহরণস্বরূপ, পৃথিবী একটি হেলি-কেন্দ্রিক রেফারেন্স সিস্টেমে সূর্যের চারপাশে চলে আসে। প্রায় সব পরিমাপের মধ্যে, আমরা পৃথিবীর সাথে সম্পর্কিত জিওসেন্ট্রিক রেফারেন্স সিস্টেমে ব্যয় করি। পৃথিবী একটি রেফারেন্স শরীরের আপেক্ষিক কোন গাড়ি চলছে, বিমান, মানুষ, প্রাণী।

বিজ্ঞান, যেমন বিজ্ঞান, তার নিজস্ব কাজ আছে। মেকানিক্স টাস্ক - স্থানটিতে শরীরের অবস্থান জানতে কোন সময়। অন্য কথায়, মেকানিকটি আন্দোলনের একটি গাণিতিক বর্ণনা তৈরি করছে এবং শারীরিক পরিমাণের মধ্যে সম্পর্কটি খুঁজে বের করে, যা এটিকে চিহ্নিত করে।
আরও সরানো যাতে, আমরা একটি ধারণা প্রয়োজন হবে " উপাদান পয়েন্ট "। তারা পদার্থবিজ্ঞান বলে - সঠিক বিজ্ঞান, কিন্তু পদার্থবিজ্ঞানীরা জানেন যে এই নির্ভুলতা সমন্বয় করার জন্য কতগুলি আনুমানিক এবং অনুমান করতে হবে। কেউ কখনও উপাদান বিন্দু দেখেনি এবং নিখুঁত গ্যাস গন্ধ না, কিন্তু তারা হয়! তারা শুধু বাস করা অনেক সহজ।
উপাদান বিন্দু শরীর, মাপ এবং ফর্ম যা এই টাস্ক প্রেক্ষাপটে অবহেলা করা যেতে পারে।
ক্লাসিক্যাল মেকানিক্স বিভাগ
মেকানিক্স বিভিন্ন বিভাগের গঠিত
- Kinematics.
- গতিবিদ্যা
- পরিসংখ্যান
Kinematics.শারীরিক দৃষ্টিকোণ থেকে, তিনি শরীরের চলন্ত হিসাবে গবেষণা। অন্য কথায়, এই বিভাগটি গতির পরিমাণগত বৈশিষ্ট্যগুলিতে নিয়োজিত। গতি, পাথ - বৈশিষ্টসূচক kinematics সমস্যা খুঁজুন
গতিবিদ্যা এটা এই ভাবে সরানো কেন প্রশ্ন করার সিদ্ধান্ত নেয়। অর্থাৎ, শরীরের উপর কাজ বাহিনী বিবেচনা করে।
পরিসংখ্যান তিনি বাহিনীর কর্মকাণ্ডের অধীনে লাশের ভারসাম্য অধ্যয়ন করেন, অর্থাৎ, প্রশ্নটির উত্তর দেন: কেন এটি পড়ে না?
শাস্ত্রীয় মেকানিক্সের প্রয়োগযোগ্যতার সীমানা
শাস্ত্রীয় মেকানিক্স আর বিজ্ঞানের অবস্থা সম্পর্কে আর দাবি করে না (শেষ শতাব্দীর শুরুতে সবকিছু সম্পূর্ণ ভিন্ন ছিল), এবং আবেদনযোগ্যতার একটি স্পষ্ট সুযোগ রয়েছে। সাধারণভাবে, শাস্ত্রীয় মেকানিক্সের আইনগুলি বিশ্বের আকারে আমাদের কাছে মোটামুটি পরিচিত (ম্যাক্রোমির)। তারা কণার বিশ্বের ক্ষেত্রে কাজ বন্ধ করে দেয়, যখন একটি কোয়ান্টাম মেকানিক ক্লাসিক প্রতিস্থাপন করতে আসে। এছাড়াও, শরীরের আন্দোলন যখন আলোর গতিতে গতিতে ঘটে তখন ক্লাসিক্যাল মেকানিক্স ক্ষেত্রে প্রযোজ্য নয়। এই ক্ষেত্রে, আপেক্ষিক প্রভাব উচ্চারণ করা হয়। মোটামুটিভাবে, কোয়ান্টাম এবং আপেক্ষিক মেকানিক্সের কাঠামোর মধ্যে - ক্লাসিক্যাল মেকানিক্সের মধ্যে, শরীরের আকারগুলি বড় হলে এটি একটি বিশেষ ক্ষেত্রে, এবং গতিটি ছোট।

সাধারণভাবে কথা বলার সময়, কোয়ান্টাম এবং আপেক্ষিক প্রভাবগুলি কোথাও যায় না, তাদের কাছে এবং ম্যাক্রোস্কোপিক সংস্থাগুলির গতির গতি, গতিতে অনেক কম গতিতে। আরেকটি বিষয় হল এই প্রভাবগুলির প্রভাবটি এতটাই সামান্য যা সবচেয়ে সঠিক পরিমাপের বাইরে যায় না। শাস্ত্রীয় মেকানিক্স, এইভাবে, তার মৌলিক গুরুত্ব হারাবে না।
আমরা নিম্নলিখিত নিবন্ধে মেকানিক্সের প্রকৃত ভিত্তি অধ্যয়ন চালিয়ে যাব। মেকানিক্স ভাল বোঝার জন্য আপনি সবসময় যোগাযোগ করতে পারেন আমাদের লেখকযা পৃথকভাবে সবচেয়ে কঠিন কাজ অন্ধকার স্পট উপর আলোর swap।