सैद्धांतिक यांत्रिकी में बिंदु की गतिशीलता का मुख्य समीकरण। स्थिर - सैद्धांतिक यांत्रिकी का खंड। पूर्ण गति और बिंदु के पूर्ण त्वरण का निर्धारण
किनेमैटिक्स पॉइंट।
1. सैद्धांतिक यांत्रिकी का विषय। मूल अवशेष।
सैद्धांतिक यांत्रिकी- यह एक ऐसा विज्ञान है जिसमें यांत्रिक आंदोलन के सामान्य कानून और भौतिक निकायों के यांत्रिक बातचीत का अध्ययन किया जा रहा है
यांत्रिक आंदोलन इसे अंतरिक्ष और समय में होने वाले किसी अन्य शरीर के सापेक्ष शरीर के आंदोलन कहा जाता है।
यांत्रिक बातचीत इसे भौतिक निकायों की इस तरह की बातचीत कहा जाता है, जो उनके यांत्रिक आंदोलन की प्रकृति को बदलता है।
स्थिति-विज्ञान - यह सैद्धांतिक यांत्रिकी का एक वर्ग है, जो ताकत प्रणालियों के बराबर प्रणालियों के परिवर्तन के लिए तरीकों का अध्ययन करता है और ठोस शरीर से जुड़ी संतुलन स्थितियों को स्थापित करता है।
गतिकी - सैद्धांतिक यांत्रिकी का यह अनुभाग जिसमें अध्ययन किया जाता है उन पर ध्यान दिए बिना, ज्यामितीय दृष्टिकोण से अंतरिक्ष में भौतिक निकायों की आवाजाही।
गतिकी - यह यांत्रिकी का एक वर्ग है जिसमें अंतरिक्ष में भौतिक निकायों के आंदोलन का अध्ययन उन पर कार्यवाही के आधार पर किया जाता है।
सैद्धांतिक यांत्रिकी में अध्ययन की वस्तुएं:
भौतिक बिंदु,
सामग्री डॉट सिस्टम
बिल्कुल ठोस शरीर।
पूर्ण स्थान और पूर्ण समय एक दूसरे में से एक। पूर्ण स्थान - त्रि-आयामी, सजातीय, स्थिर यूक्लिडियन अंतरिक्ष। निरपेक्ष समय - अतीत से भविष्य में लगातार बहते हुए, यह समान रूप से अंतरिक्ष के सभी बिंदुओं में समान रूप से होता है और इस मामले के आंदोलन पर निर्भर नहीं होता है।
2. Kinematics का विषय।
गतिकी - यांत्रिकी का यह खंड, जिसमें निकायों के आंदोलन के ज्यामितीय गुणों का अध्ययन उनके जड़त्व (यानी, जनता) और उन पर कार्य करने वाली सेनाओं को ध्यान में रखे बिना किया जाता है
उस शरीर के साथ चलने वाले शरीर (या बिंदु) की स्थिति निर्धारित करने के लिए, जिसके संबंध में इस शरीर के आंदोलन का अध्ययन किया जाता है, कठोरता से, शरीर के साथ मिलकर कुछ समन्वय प्रणाली बांधती है संदर्भ प्रणाली।
Kinematics का मुख्य कार्य यह है कि, इस शरीर (बिंदु) के आंदोलन के कानून को जानकर, अपने आंदोलन (गति और त्वरण) को चिह्नित करने वाले सभी किनेमैटिक मूल्यों को निर्धारित करने के लिए।
3. एक बिंदु आंदोलन सेट करने के तरीके
· प्राकृतिक तरीका
यह ज्ञात होना चाहिए:
प्रक्षेपवक्र गति बिंदु;
संदर्भ की शुरुआत और दिशा;
फॉर्म में दिए गए प्रक्षेपवक्र के अनुसार बिंदु के आंदोलन का कानून (1.1)
· समन्वय विधि
समीकरण (1.2) - एम। की गति के समीकरण।
बिंदु मीटर के प्रक्षेपण के समीकरण को समय पैरामीटर को छोड़कर प्राप्त किया जा सकता है « टी » समीकरणों से (1.2)
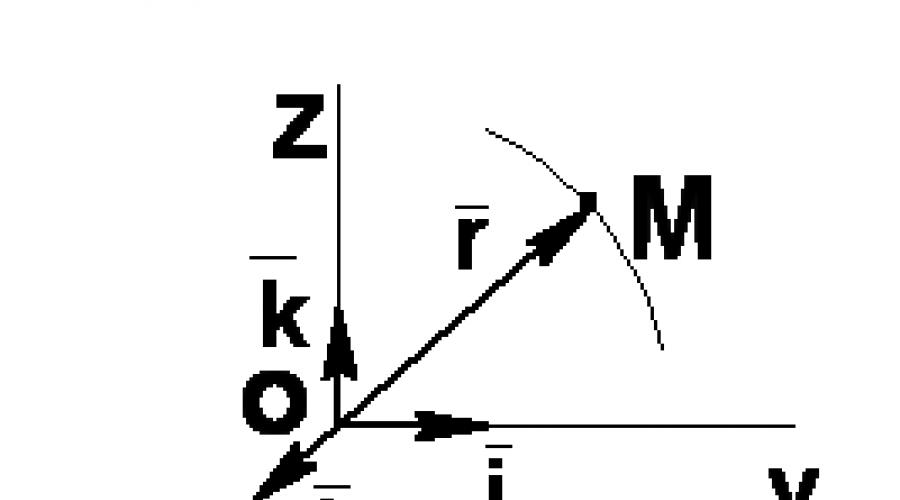
· वेक्टर फैशन
|
|
(1.3) बिंदु के आंदोलन के बिंदु के समन्वय और वेक्टर तरीकों के बीच संचार
|

लक्ष्य यातायात के समन्वय और प्राकृतिक तरीकों के बीच संचार
समीकरणों (1.2) से समय को समाप्त करने के लिए बिंदु पथ निर्धारित करें;
-- प्रक्षेपवक्र के साथ बिंदु की गति का नियम खोजें (एक आर्क अंतर के लिए एक अभिव्यक्ति का उपयोग करें)
एकीकरण के बाद, हमें दिए गए प्रक्षेपवक्र के अनुसार बिंदु के आंदोलन का कानून मिलता है:
बिंदु के आंदोलन के बिंदु के समन्वय और वेक्टर विधियों के बीच संबंध समीकरण द्वारा निर्धारित किया जाता है (1.4)
4. आंदोलन को स्थापित करने की वेक्टर विधि में बिंदु की गति का निर्धारण करना।
समय के समयटीबिंदु की स्थिति त्रिज्या-वेक्टर द्वारा निर्धारित की जाती है, और समय के समयटी 1
- त्रिज्या-वेक्टर, फिर समय के साथ ![]() बिंदु आगे बढ़ेगा।
बिंदु आगे बढ़ेगा।
|
|
बिंदु का औसत बिंदु, निर्देशित वेक्टर के साथ ही वेक्टर
|

 (1.5)
(1.5)
किसी दिए गए समय पर बिंदु बिंदु
इस समय बिंदु की गति प्राप्त करने के लिए, एक सीमा बनाना आवश्यक है
 (1.6)
(1.6)
(1.7)
वर्तमान समय पर पॉइंट स्पीड वेक्टर यह समय पर त्रिज्या-वेक्टर के पहले व्युत्पन्न के बराबर है और इस बिंदु पर प्रक्षेपण के लिए टेंगेंट के लिए है।
(इकाई)¾ एम / एस, किमी / घंटा)
वेक्टर मध्य त्वरण वेक्टर के समान दिशा हैΔ वी इसका उद्देश्य प्रक्षेपवक्र की प्रगति की ओर है।
एक निश्चित समय पर वेक्टर त्वरण बिंदु यह वेग वेक्टर के पहले व्युत्पन्न या समय में त्रिज्या-वेक्टर बिंदु के दूसरे व्युत्पन्न के बराबर है।
(मापन इकाई -)
प्रक्षेपवक्र बिंदु के संबंध में वेक्टर कैसे है?
Rectilinear गति के साथ, वेक्टर सीधे निर्देशित किया जाता है, जो बिंदु को स्थानांतरित करता है। यदि पथ प्रक्षेपण एक फ्लैट वक्र है, तो त्वरण की गति, साथ ही साथ वेक्टर के वेक्टर इस वक्र के विमान में निहित है और इसकी सहावी की ओर निर्देशित है। यदि प्रक्षेपवक्र एक फ्लैट वक्र नहीं है, तो सीपी के वेक्टर को प्रक्षेपण की प्रगति की दिशा में निर्देशित किया जाएगा और इस बिंदु पर टेंगेंट के माध्यम से गुजरने वाले विमान में झूठ बोलेंगेम। और सीधे, अगले बिंदु में समानांतर स्पर्शकएम 1। . में जब बिंदुएम 1। करना चाहता है म। यह विमान तथाकथित स्पर्श विमान की स्थिति पर है। इसलिए, सामान्य मामले में, त्वरण वेक्टर स्पर्श विमान में निहित है और वक्र की जमा राशि की ओर निर्देशित है।
किसी भी प्रशिक्षण पाठ्यक्रम के ढांचे के भीतर, भौतिकी का अध्ययन यांत्रिकी के साथ शुरू होता है। सैद्धांतिक के साथ नहीं, लागू और कंप्यूटिंग के साथ नहीं, लेकिन पुराने अच्छे शास्त्रीय यांत्रिकी के साथ। इस यांत्रिकी को न्यूटन यांत्रिकी भी कहा जाता है। पौराणिक कथा के अनुसार, वैज्ञानिक बगीचे के चारों ओर चले गए, जिससे ऐप्पल गिर गया, और यह इस घटना थी जिसने उन्हें वैश्विक दुनिया के उद्घाटन में धक्का दिया। बेशक, कानून हमेशा अस्तित्व में था, और न्यूटन ने उन्हें एक फॉर्म-समझने योग्य रूप दिया, लेकिन उनकी योग्यता अमूल्य है। इस लेख में, हम न्यूटनियन यांत्रिकी के कानूनों को जितना संभव हो सके सबसे विस्तृत रूप से नहीं पेंट करेंगे, लेकिन मूल बातें, बुनियादी ज्ञान, परिभाषाओं और सूत्रों को बताएं जो हमेशा आपके हाथ पर खेल सकते हैं।
मैकेनिक्स - भौतिकी का अनुभाग, विज्ञान सामग्री निकायों और उनके बीच बातचीत के आंदोलन का अध्ययन करता है।
शब्द में एक ग्रीक मूल है और "कला निर्माण मशीनों" के रूप में अनुवाद करता है। लेकिन कारों के निर्माण से पहले, हम अभी भी चंद्रमा को पसंद करते हैं, तो चलिए हमारे पूर्वजों के चरणों में जाते हैं, और हम क्षितिज के कोण पर फेंकने वाले पत्थरों के आंदोलन का अध्ययन करेंगे, और ऊंचाई एच से सिर पर गिरने वाले सेब।

भौतिकी का अध्ययन मैकेनिक्स के साथ क्यों शुरू होता है? क्योंकि यह पूरी तरह से प्राकृतिक है, थर्मोडायनामिक संतुलन से इसे शुरू करने के लिए नहीं?!
मैकेनिक्स सबसे पुरानी विज्ञान में से एक हैं, और ऐतिहासिक रूप से सीखने वाले भौतिकी ने मैकेनिक्स की मूल बातें शुरू की। समय और स्थान के ढांचे में रखा गया, वास्तव में लोग, सभी इच्छाओं के साथ, किसी और चीज से शुरू नहीं हो सका। मूविंग बॉडीज - पहली बात जो हम आपका ध्यान देते हैं।
आंदोलन क्या है?
यांत्रिक आंदोलन समय के साथ एक दूसरे के सापेक्ष अंतरिक्ष में निकायों की स्थिति में एक बदलाव है।
यह इस परिभाषा के बाद है कि हम पूरी तरह से संदर्भ प्रणाली की अवधारणा पर आते हैं। एक दूसरे के सापेक्ष अंतरिक्ष में निकायों की स्थिति बदलना। यहां कीवर्ड: एक दूसरे के सापेक्ष । आखिरकार, कार में यात्री एक निश्चित गति से किसी व्यक्ति की साइडलाइन पर अपेक्षाकृत खड़े हो जाता है, और आस-पास की सीट पर अपने पड़ोसी पर रहता है, और कार में यात्री के सापेक्ष कुछ अन्य गति के साथ चलता है जो उन्हें खत्म कर देता है।

यही कारण है कि, सामान्य रूप से चलती वस्तुओं के पैरामीटर को मापने के लिए और भ्रमित नहीं हो, हमें जरूरत है संदर्भ प्रणाली कठोर रूप से उलटी गिनती, समन्वय प्रणाली और घड़ी है। उदाहरण के लिए, पृथ्वी एक हेली-केंद्रित संदर्भ प्रणाली में सूर्य के चारों ओर घूमती है। इसके लगभग सभी मापों में, हम पृथ्वी से संबंधित भूगर्भीय संदर्भ प्रणाली में खर्च करते हैं। पृथ्वी एक संदर्भ निकाय है कि कौन सी कारें चलती हैं, हवाई जहाज, लोग, जानवर हैं।

विज्ञान की तरह यांत्रिकी का अपना कार्य है। यांत्रिकी का कार्य - किसी भी समय अंतरिक्ष में शरीर की स्थिति को जानने के लिए। दूसरे शब्दों में, मैकेनिक आंदोलन का गणितीय विवरण बना रहा है और भौतिक मात्राओं के बीच संबंध पाता है, जो इसे दर्शाता है।
आगे बढ़ने के लिए, हमें एक अवधारणा की आवश्यकता होगी " सामग्री बिंदु "।" वे भौतिकी कहते हैं - सटीक विज्ञान, लेकिन भौतिकविदों को पता है कि इस सटीकता को समन्वयित करने के लिए कितने अनुमानों और धारणाओं को कितना करना है। किसी ने कभी भी भौतिक बिंदु नहीं देखा है और सही गैस की गंध नहीं की, लेकिन वे हैं! वे रहने के लिए बहुत आसान हैं।
भौतिक बिंदु शरीर, आकार और रूप है जिसमें इस कार्य के संदर्भ में उपेक्षित किया जा सकता है।
शास्त्रीय यांत्रिकी के अनुभाग
मैकेनिक्स में कई वर्ग होते हैं
- गतिकी
- गतिकी
- स्थिति-विज्ञान
गतिकीभौतिक दृष्टिकोण से, वह शरीर की चाल के रूप में अध्ययन करता है। दूसरे शब्दों में, यह खंड गति की मात्रात्मक विशेषताओं में लगी हुई है। गति खोजें, पथ - विशिष्ट किनेमैटिक्स समस्याएं
गतिकी सवाल यह तय करता है कि यह इस तरह से क्यों चलता है। यही है, शरीर पर अभिनय करने वाली ताकतों को मानता है।
स्थिति-विज्ञान वह बलों की कार्रवाई के तहत निकायों के संतुलन का अध्ययन करता है, यानी सवाल का जवाब देता है: यह बिल्कुल क्यों नहीं गिरता है?
शास्त्रीय यांत्रिकी की प्रयोज्यता की सीमाएं
शास्त्रीय यांत्रिकी अब सब कुछ समझाते हुए विज्ञान की स्थिति का दावा नहीं करते हैं (पिछली शताब्दी की शुरुआत में सबकुछ पूरी तरह से अलग था), और प्रयोज्यता का स्पष्ट दायरा है। आम तौर पर, शास्त्रीय यांत्रिकी के कानून दुनिया के आकार (मैक्रोमिर) में काफी परिचित हैं। वे कणों की दुनिया के मामले में काम करना बंद कर देते हैं, जब क्वांटम मैकेनिक क्लासिक को प्रतिस्थापित करने के लिए आता है। इसके अलावा, शास्त्रीय यांत्रिकी उन मामलों पर लागू नहीं होते हैं जब शरीर की गति प्रकाश की गति के करीब की गति से होती है। ऐसे मामलों में, सापेक्ष प्रभाव स्पष्ट हो जाते हैं। मोटे तौर पर, क्वांटम और सापेक्ष यांत्रिकी के ढांचे के भीतर - शास्त्रीय यांत्रिकी, यह एक विशेष मामला है जब शरीर के आकार बड़े होते हैं, और गति छोटी होती है।

आम तौर पर बोलते हुए, क्वांटम और सापेक्ष प्रभाव कभी भी कहीं नहीं जाते हैं, उनके पास गति की गति की बहुत कम गति पर मैक्रोस्कोपिक निकायों की सामान्य गति के साथ और होने की जगह होती है। एक और बात यह है कि इन प्रभावों का प्रभाव इतना छोटा है जो सबसे सटीक माप से आगे नहीं जाता है। शास्त्रीय यांत्रिकी, इस प्रकार, अपने मौलिक महत्व को कभी नहीं खोएगा।
हम निम्नलिखित लेखों में यांत्रिकी की भौतिक नींव का अध्ययन करना जारी रखेंगे। मैकेनिक्स की बेहतर समझ के लिए आप हमेशा संपर्क कर सकते हैं हमारे लेखकोंजो सबसे कठिन कार्य के अंधेरे स्थान पर व्यक्तिगत रूप से प्रकाश स्वैप करता है।
शरीर प्रणाली के वक्ताओं के सामान्य प्रमेय। द्रव्यमान के केंद्र के आंदोलन पर प्रमेय, गतिशीलता की मात्रा को बदलने के बारे में, गतिशील ऊर्जा को बदलने के बारे में, आंदोलन की मात्रा को बदलने के बारे में। दलामबर्ट के सिद्धांत, और संभावित आंदोलन। वक्ताओं के सामान्य समीकरण। Lagrange समीकरण।
सामग्रीवह काम जो शक्ति बनाता है ताकत वाले वैक्टर के स्केलर उत्पाद और इसके आवेदन के बिंदु के असीम रूप से छोटे आंदोलन के बराबर है:
,
यही है, उनके बीच कोण के कोसाइन पर एफ और डीएस वैक्टर के मॉड्यूल का उत्पाद।
काम करते हैं कि बलों का क्षण टोक़ वैक्टर के स्केलर उत्पाद और रोटेशन के एक असीम रूप से छोटे कोण के बराबर है:
.
दालाम्बर का सिद्धांत
दलाम्बर के सिद्धांत का सार वक्ताओं को स्थैतिक कार्यों को कम करने के लिए कार्य करना है। इसके लिए, यह माना जाता है कि (या इसे पहले से जाना जाता है) कि सिस्टम के शरीर में निश्चित (कोणीय) त्वरण होते हैं। इसके बाद, जड़ता की पेशकश की जाती है और (या) जड़ता बलों के क्षणों, जो आकार में बराबर होते हैं और बलों के बलों की दिशाओं और क्षणों की दिशा में विपरीत होते हैं, जो कि यांत्रिकी के कानूनों के अनुसार, निर्दिष्ट त्वरण या बनाएंगे, कोणीय त्वरण
एक उदाहरण पर विचार करें। शरीर का मार्ग अनुवाद आंदोलन और बाहरी बलों पर कार्य करता है। इसके बाद, हम मानते हैं कि ये बलों द्रव्यमान प्रणाली के केंद्र का त्वरण बनाते हैं। जनता के केंद्र के आंदोलन पर प्रमेय के मुताबिक, शरीर के द्रव्यमान के केंद्र में एक ही त्वरण होगा, अगर शरीर पर बिजली संचालित की गई थी। इसके बाद, हम जड़ता की शक्ति पेश करते हैं:
.
उसके बाद, वक्ताओं का कार्य:
.
;
.
घूर्णन गति के लिए उसी तरह आता है। शरीर को जेड अक्ष के चारों ओर घूमने दें और इसके लिए एम ई जेडके के बाहरी क्षण हैं। हम मानते हैं कि ये क्षण एक कोणीय त्वरण ε z बनाते हैं। इसके बाद, हम जड़ता के बल एम और \u003d - जे जेड ε z का क्षण पेश करते हैं। उसके बाद, वक्ताओं का कार्य:
.
स्थैतिक के कार्य में बदल जाता है:
;
.
संभावित आंदोलनों का सिद्धांत
संभावित आंदोलनों का सिद्धांत सांख्यिकी कार्यों को हल करने के लिए प्रयोग किया जाता है। कुछ कार्यों में, यह समीकरण समीकरणों को आकर्षित करने की तुलना में एक छोटा समाधान देता है। यह विशेष रूप से कनेक्शन के साथ सिस्टम के बारे में सच है (उदाहरण के लिए, धागे और ब्लॉक से जुड़े निकायों) में कई निकायों से मिलकर।
संभावित आंदोलनों का सिद्धांत.
आदर्श बांड के साथ यांत्रिक प्रणाली के संतुलन के लिए, यह आवश्यक है और पर्याप्त है कि किसी भी संभावित सिस्टम आंदोलन के साथ इस पर कार्य करने वाली सभी सक्रिय ताकतों के प्राथमिक कार्य का योग शून्य था।
सिस्टम के संभावित आंदोलन - यह एक छोटा सा आंदोलन है जिसमें सिस्टम पर लगाए गए कनेक्शन का उल्लंघन नहीं किया जाता है।
आदर्श कनेक्शन - ये कनेक्शन हैं जो सिस्टम को स्थानांतरित करते समय काम नहीं करते हैं। अधिक सटीक रूप से, जब सिस्टम चल रहा है तो कनेक्शन द्वारा किए गए कार्यों की मात्रा शून्य होती है।
वक्ताओं के सामान्य समीकरण (दालाम्बर का सिद्धांत - लग्रेंज)
दलामबर का सिद्धांत - LAgrange संभावित आंदोलनों के सिद्धांत के साथ दलामबर्ट के सिद्धांत का संबंध है। यही है, गतिशीलता की समस्या को हल करते समय, हम जड़ता बलों को पेश करते हैं और संभावित आंदोलनों के सिद्धांत की सहायता से हम जो आंकड़ों को हल करते हैं, उनके कार्य को कम करते हैं।
दालामबर का सिद्धांत - लग्रेंज.
प्रत्येक पल में आदर्श बांड के साथ यांत्रिक प्रणाली को स्थानांतरित करते समय, सभी संलग्न सक्रिय बलों के प्राथमिक कार्य की राशि और सिस्टम के किसी भी संभावित आंदोलन पर सभी जड़ें बलों शून्य हैं:
.
इस समीकरण को कहा जाता है वक्ताओं का समग्र समीकरण.
लैगरेंज समीकरण
सामान्यीकृत समन्वय Q. 1, क्यू 2, ..., क्यू एन - यह एन मानों का संयोजन है जो सिस्टम की स्थिति को स्पष्ट रूप से निर्धारित करता है।
सामान्यीकृत समन्वय एन की संख्या प्रणाली की स्वतंत्रता की डिग्री की संख्या के साथ मेल खाती है।
सामान्यीकृत गति - ये समय टी के सामान्यीकृत निर्देशांक से प्राप्त होते हैं।
सामान्यीकृत सेना Q. 1, क्यू 2, ..., क्यू एन
.
सिस्टम के संभावित आंदोलन पर विचार करें, जिसमें समन्वय q k को आंदोलन δQ k प्राप्त होगा। शेष निर्देशांक अपरिवर्तित रहते हैं। चलो δ k को इस तरह के कदम के साथ बाहरी बलों द्वारा किया गया कार्य हो। फिर
Δa k \u003d q k δq k, या
.
यदि, सिस्टम के संभावित आंदोलन के साथ, सभी निर्देशांक बदल दिए जाते हैं, इस तरह के कदम के साथ बाहरी ताकतों द्वारा किए गए कार्य में फॉर्म होता है:
ΔA \u003d Q. 1 δQ 1 + क्यू 2 δQ 2 + ... + क्यू एन δQ एन.
फिर सामान्यीकृत शक्तियां आंदोलन कार्य से आंशिक डेरिवेटिव हैं:
.
संभावित बलों के लिए संभावित π के साथ,
.
लैगरेंज समीकरण - ये सामान्यीकृत निर्देशांक में यांत्रिक प्रणाली के समीकरण हैं:
यहां टी गतिशील ऊर्जा है। यह सामान्यीकृत निर्देशांक, गति और संभवतः, समय का एक कार्य है। इसलिए, इसका निजी व्युत्पन्न भी सामान्यीकृत निर्देशांक, गति और समय का एक कार्य है। इसके बाद, यह विचार करना आवश्यक है कि निर्देशांक और गति समय के कार्य हैं। इसलिए, समय में एक पूर्ण व्युत्पन्न खोजने के लिए, आपको एक जटिल समारोह के भेदभाव नियम को लागू करने की आवश्यकता है:
.
संदर्भ:
एस एम। तारग, सैद्धांतिक यांत्रिकी का एक संक्षिप्त पाठ्यक्रम, "हायर स्कूल", 2010।
पाठ्यक्रम माना जाता है: बिंदु और ठोस शरीर के किनेमेटिक्स (और विभिन्न दृष्टिकोणों से, यह एक ठोस के अभिविन्यास की समस्या पर विचार करने का प्रस्ताव है), यांत्रिक प्रणालियों की गतिशीलता के शास्त्रीय कार्यों और ठोस शरीर की गतिशीलता, खगोलीय यांत्रिकी के तत्व, परिवर्तनीय संरचना प्रणाली की आवाजाही, प्रभाव का सिद्धांत, विश्लेषणात्मक गतिशीलता के अंतर समीकरण।
सैद्धांतिक यांत्रिकी के सभी पारंपरिक वर्ग प्रस्तुत किए जाते हैं, लेकिन सिद्धांत और विश्लेषणात्मक यांत्रिकी के तरीकों के सिद्धांतों और अनुप्रयोगों के लिए सबसे अधिक जानकारीपूर्ण और मूल्यवान के विचार के लिए विशेष ध्यान दिया जाता है; स्टेटिक्स का अध्ययन वक्ताओं के एक वर्ग के रूप में किया जाता है, और किनेमैटिक्स सेक्शन में, अवधारणाओं और गणितीय उपकरण को विस्तार से पेश किया जाता है।
सूचनात्मक संसाधन
गंतम्कर एफआर विश्लेषणात्मक यांत्रिकी पर व्याख्यान। - तीसरा एड। - एम।: FIZMATLIT, 2001।
Zhuravleov v.f. सैद्धांतिक यांत्रिकी के मूलभूत सिद्धांत। - 2 एड। - एम।: FIZMATLIT, 2001; तीसरा एड। - एम।: FIZMATLIT, 2008।
मार्केव ए.पी. सैद्धांतिक यांत्रिकी। - मॉस्को - इज़ेव्स्क: एनआईसी "नियमित और अराजक गतिशीलता", 2007।
आवश्यकताओं को
पाठ्यक्रम उन छात्रों के लिए डिज़ाइन किया गया है जो तकनीकी विश्वविद्यालय के पहले पाठ्यक्रम के दायरे में विश्लेषणात्मक ज्यामिति और रैखिक बीजगणित हैं।
कोर्स कार्यक्रम
1. Kinematics अंक
1.1। Kinematics कार्य। Decartova समन्वय प्रणाली। ऑर्थोनॉर्मल आधार द्वारा वेक्टर का अपघटन। त्रिज्या वेक्टर और बिंदु निर्देशांक। गति और त्वरण बिंदु। आंदोलन का प्रक्षेपवक्र।
1.2। प्राकृतिक ट्रिगर। एक प्राकृतिक तीन-एज (Guigens प्रमेय) की अक्षों में गति और त्वरण का अपघटन।
1.3। अंक के घुमावदार निर्देशांक, उदाहरण: ध्रुवीय, बेलनाकार और गोलाकार समन्वय प्रणाली। Curvilinear समन्वय प्रणाली की धुरी पर त्वरण के घटक और अनुमान।
2. एक ठोस शरीर के अभिविन्यास को सेट करने के तरीके
2.1। ठोस। फिक्स्ड और बाध्यकारी समन्वय प्रणाली।
2.2। ऑर्थोगोनल टर्न मैट्रिस और उनकी गुण। अंतिम मोड़ के बारे में यूलर प्रमेय।
2.3। ऑर्थोगोनल परिवर्तन पर सक्रिय और निष्क्रिय दृष्टिकोण। मोड़ के अलावा।
2.4। परिमित रोटेशन के कोनों: यूलर और "विमान" कोण के कोण। परिमित रोटेशन के कोणों के माध्यम से ऑर्थोगोनल मैट्रिक्स की अभिव्यक्ति।
3. ठोस के स्थानिक आंदोलन
3.1। एक ठोस शरीर की सुरक्षात्मक और घूर्णन गति। कोने की गति और कोणीय त्वरण।
3.2। ठोस डॉट्स के वेग (यूलर फॉर्मूला) और त्वरण (प्रतिद्वंद्वियों सूत्र) का वितरण।
3.3। Kinematic invariants। Kinematic पेंच। तत्काल पेंच धुरी।
4. फ्लैट समानांतर गति
4.1। विमान समानांतर शरीर आंदोलन की अवधारणा। एक विमान समानांतर आंदोलन के मामले में कोने की गति और कोणीय त्वरण। तत्काल गति केंद्र।
5. बिंदु और ठोस शरीर के जटिल आंदोलन
5.1। फिक्स्ड और मूविंग समन्वय प्रणाली। पूर्ण, सापेक्ष और पोर्टेबल बिंदु आंदोलन।
5.2। बिंदु, सापेक्ष और पोर्टेबल पॉइंट गति के जटिल आंदोलन के साथ गति के अलावा प्रमेय। बिंदु, सापेक्ष, पोर्टेबल और कोरिओलिस त्वरण बिंदु के एक जटिल आंदोलन के साथ त्वरण को जोड़ने पर कोरियोलिस प्रमेय।
5.3। पूर्ण, सापेक्ष और पोर्टेबल कोणीय वेग और शरीर के कोणीय त्वरण।
6. निश्चित बिंदु के साथ ठोस गति (quaternion प्रस्तुति)
6.1। जटिल और हाइपरकंप्लेक्स संख्या की अवधारणा। बीजगणित quaternions। Quaternion काम। दूषित और रिवर्स quaternion, मानदंड और मॉड्यूल।
6.2। एकल quaternion के त्रिकोणमितीय प्रतिनिधित्व। शरीर की बारी सेट करने के लिए quaternion रास्ता। अंतिम मोड़ के बारे में यूलर प्रमेय।
6.3। विभिन्न अड्डों में quaternion घटकों के बीच संचार। मोड़ के अलावा। पैरामीटर रॉड्रिगा हैमिल्टन।
7. परीक्षा कार्य
8. गतिशीलता की मूल अवधारणाएं।
8.1 नाड़ी, आवेग का क्षण (गतिशील क्षण), गतिशील ऊर्जा।
8.2 ताकतों की शक्ति, कार्य प्रयास, संभावित और पूर्ण ऊर्जा।
8.3 मास सेंटर (जड़ता) प्रणाली। एक्सिस के सापेक्ष सिस्टम की जड़ता का क्षण।
समानांतर अक्षों के सापेक्ष जड़ता के 8.4 क्षण; Guiggens-Steiner प्रमेय।
8.5 टेंसर और इलिप्सिड जड़ता। जड़ता की मुख्य अक्ष। अक्षीय क्षण जड़ता की गुण।
8.6 जड़ता टेंसर के साथ आवेग और गतिशील शरीर ऊर्जा के क्षण की गणना।
9. जड़ता और गैर-जड़ता संदर्भ प्रणाली में मुख्य वक्ता प्रमेय।
9.1 इनर्टियल रेफरेंस सिस्टम में सिस्टम आवेग में परिवर्तन पर प्रमेय। मास के केंद्र के आंदोलन पर प्रमेय।
9.2 अधर्म संदर्भ प्रणाली में सिस्टम पल्स के पल को बदलने पर प्रमेय।
9.3 जड़ता संदर्भ प्रणाली में सिस्टम की गतिशील ऊर्जा में परिवर्तन पर प्रमेय।
9.4 संभावित, gyroscopic और अपव्यय बलों।
9.5 गैर-जड़त्व संदर्भ प्रणाली में मुख्य वक्ता प्रमेय।
10. जड़ता द्वारा एक निश्चित बिंदु के साथ एक ठोस शरीर का आंदोलन।
10.1 गतिशील यूलर समीकरण।
10.2 यूलर केस, गतिशील समीकरणों की पहली इंटीग्रल; स्थायी रोटेशन।
10.3 पोनासो और मैककॉलल की व्याख्या।
10.4 शरीर की गतिशील समरूपता के मामले में नियमित पूर्ववर्ती।
11. एक निश्चित बिंदु के साथ भारी ठोस शरीर की आवाजाही।
11.1 सामान्य रूप से एक भारी ठोस के आंदोलन की समस्या को स्थापित करना।
नियत बिन्दु। गतिशील यूलर समीकरण और उनकी पहली इंटीग्रल।
11.2 अल्पांग के मामले में ठोस आंदोलन के गुणात्मक विश्लेषण।
11.3 गतिशील रूप से सममित ठोस शरीर के नियमित पूर्वाग्रह को मजबूर।
11.4 बेसिक जीरोस्कोपी फॉर्मूला।
11.5 Gyroscopes के प्राथमिक सिद्धांत की अवधारणा।
12. केंद्रीय क्षेत्र में प्वाइंट डायनेमिक्स।
12.1 बीना समीकरण।
12.2 ऑर्बिटा समीकरण। केप्लर कानून।
12.3 बिखरने का कार्य।
12.4 कार्य दो Tel। गति के समीकरण। स्क्वायर, अभिन्न ऊर्जा, लैपलेस अभिन्न का अभिन्न।
13. परिवर्तनीय संरचना प्रणाली की गतिशीलता।
13.1 वैरिएबल कंपोज़ेशन सिस्टम में मूल गतिशील मान बदलने पर बुनियादी अवधारणाएं और प्रमेय।
13.2 सामग्री चर द्रव्यमान की गति।
13.3 परिवर्तनीय संरचना के शरीर की गति के समीकरण।
14. आवेगी आंदोलनों का सिद्धांत।
14.1 आवेगी आंदोलनों के मूल अवधारणाओं और सिद्धांतों।
आवेगी गति पर मूल गतिशील मूल्यों में परिवर्तन पर 14.2 प्रमेय।
14.3 आवेगी फर्मवेयर आंदोलन।
14.4 दो ठोस निकायों की टकराव।
14.5 कारो के प्रमेय।
15. परीक्षा
सीखने के परिणाम
अनुशासन के विकास के परिणामस्वरूप, छात्र को चाहिए:
- जानना:
- यांत्रिकी के मुख्य अवधारणाओं और प्रमेय और उनसे उत्पन्न यांत्रिक तंत्र के आंदोलन का अध्ययन करने के तरीकों;
- करने में सक्षम हों:
- सैद्धांतिक यांत्रिकी के संदर्भ में समस्याओं को सही ढंग से तैयार करें;
- विचाराधीन घटना के मूल गुणों को पर्याप्त रूप से प्रतिबिंबित करने वाले यांत्रिक और गणितीय मॉडल विकसित करना;
- संबंधित विशिष्ट कार्यों को हल करने के लिए प्राप्त ज्ञान को लागू करें;
- खुद:
- सैद्धांतिक यांत्रिकी और गणित की शास्त्रीय समस्याओं को हल करने के लिए कौशल;
- यांत्रिकी की समस्याओं का अध्ययन करने और यांत्रिक और गणितीय मॉडल बनाने के लिए कौशल जो विभिन्न यांत्रिक घटनाओं की पर्याप्त रूप से वर्णन करते हैं;
- समस्याओं को हल करने में सैद्धांतिक यांत्रिकी के तरीकों और सिद्धांतों के व्यावहारिक उपयोग के कौशल: बिजली गणना, आंदोलन को निर्धारित करने के विभिन्न तरीकों से निकायों की किनेमेटिक विशेषताओं को निर्धारित करना, सामग्री निकायों की गति और यांत्रिक प्रणालियों की गति का निर्धारण करना ताकतों;
- आधुनिक शैक्षणिक और सूचना प्रौद्योगिकी का उपयोग करते हुए, औद्योगिक और वैज्ञानिक गतिविधि की प्रक्रिया में स्वतंत्र रूप से नई जानकारी मास्टर करें;
संतुलन की स्थिति के तहत, सांख्यिकी में, यह एक राज्य के रूप में समझा जाता है जिसमें यांत्रिक प्रणाली के सभी हिस्सों को कुछ जृषित समन्वय प्रणाली के सापेक्ष आराम किया जाता है। बुनियादी सांख्यिकी वस्तुओं में से एक उनके आवेदन की ताकत और अंक हैं।
अन्य बिंदुओं से त्रिज्या वेक्टर के साथ भौतिक बिंदु पर अभिनय बल विचार के तहत बिंदु पर अन्य बिंदुओं के प्रभावों का माप है, जिसके परिणामस्वरूप इसे जड़ता संदर्भ प्रणाली के सापेक्ष त्वरण मिलता है। मूल्य ताकतों सूत्र द्वारा निर्धारित:
,
जहां मीटर बिंदु का बिंदु है - बिंदु के गुणों के आधार पर मूल्य। इस सूत्र को न्यूटन के दूसरे कानून कहा जाता है।
गतिशीलता में सांख्यिकी का आवेदन
न्यायसंगत ठोस आंदोलन समीकरणों की एक महत्वपूर्ण विशेषता यह है कि बलों को समकक्ष प्रणालियों में परिवर्तित किया जा सकता है। गति समीकरण के इस रूपांतरण के साथ, यह संरक्षित है, लेकिन शरीर पर कार्यरत बलों की प्रणाली को एक सरल प्रणाली में परिवर्तित किया जा सकता है। इस प्रकार, बल के आवेदन का बिंदु अपनी लाइन के साथ स्थानांतरित किया जा सकता है; समांतरोग्राम के नियम के अनुसार बलों को रखा जा सकता है; एक बिंदु पर संलग्न बलों को उनके ज्यामितीय राशि द्वारा प्रतिस्थापित किया जा सकता है।
इस तरह के परिवर्तनों का एक उदाहरण गुरुत्वाकर्षण की शक्ति है। यह ठोस के सभी बिंदुओं पर कार्य करता है। लेकिन शरीर के आंदोलन का कानून तब नहीं बदलेगा जब सभी बिंदुओं पर वितरित गुरुत्वाकर्षण द्रव्यमान शरीर के केंद्र में लागू एक वेक्टर द्वारा प्रतिस्थापित किया गया है।
यह पता चला है कि यदि हम शरीर पर कार्यरत बलों की मुख्य प्रणाली के लिए हैं, तो एक समकक्ष प्रणाली जोड़ें जिसमें बलों के निर्देशों को विपरीत में बदल दिया जाता है, शरीर, इन प्रणालियों की कार्रवाई के तहत, संतुलन होगा। इस प्रकार, ताकतों की समतुल्य प्रणालियों को निर्धारित करने का कार्य समेकन के कार्य में कम हो जाता है, जो कि स्थिरता की समस्या के लिए है।
स्थैतिक का मुख्य कार्य बलों की प्रणाली को समतुल्य प्रणालियों में परिवर्तित करने के लिए कानूनों की स्थापना है। इस प्रकार, सांख्यिकी के तरीकों को न केवल संतुलन में निकायों का अध्ययन करते समय, बल्कि ठोस की गतिशीलता में भी लागू किया जाता है, जब सरल समकक्ष प्रणालियों में ताकत को परिवर्तित किया जाता है।
स्थैतिक सामग्री बिंदु
एक भौतिक बिंदु पर विचार करें जो संतुलन में है। और इसे एन सेनाएं, k \u003d 1, 2, ..., एन.
यदि भौतिक बिंदु संतुलन में है, तो उस पर कार्य करने वाली ताकत का वेक्टर योग शून्य है:
(1)
.
संतुलन में, बिंदु पर कार्यरत बलों की ज्यामितीय राशि शून्य है।
ज्यामितीय व्याख्या। यदि पहले वेक्टर के अंत में दूसरे वेक्टर की शुरुआत करने के लिए, और दूसरे वेक्टर के अंत में तीसरे की शुरुआत करने के लिए, और आगे की प्रक्रिया को जारी रखने के लिए, बाद के अंत, एन-एगो वेक्टर पहले वेक्टर की शुरुआत के साथ संयुक्त किया जाएगा। यही है, हमें एक बंद ज्यामितीय आकार मिलेगा, जिनके पक्षों की लंबाई वैक्यूल के मॉड्यूल के बराबर होती है। यदि सभी वैक्टर एक ही विमान में झूठ बोलते हैं, तो हमें एक बंद बहुभुज मिलेगा।
यह अक्सर चुनना सुविधाजनक है आयताकार समन्वय प्रणाली ऑक्सीज़। फिर निर्देशांक की धुरी पर सभी ताकत वाले वैक्टर के अनुमानों की मात्रा शून्य है:
यदि आप कुछ वेक्टर द्वारा परिभाषित किसी भी दिशा को चुनते हैं, तो इस दिशा के लिए बलों के अनुमानों का योग शून्य है:
.
गुणा समीकरण (1) वेक्टर को स्केलर:
.
यहां वैक्टर का एक स्केलर उत्पाद है और।
ध्यान दें कि वेक्टर की दिशा में वेक्टर का प्रक्षेपण सूत्र द्वारा निर्धारित किया जाता है:
.
स्थैतिक ठोस
बिंदु के सापेक्ष शक्ति का क्षण
शक्ति का क्षण निर्धारित करना
शक्ति का क्षण निश्चित केंद्र ओ के सापेक्ष बिंदु ए पर शरीर पर लागू होता है, को वेक्टर के वेक्टर उत्पाद के बराबर वेक्टर कहा जाता है और:(2) .
ज्यामितीय व्याख्या

ताकत का क्षण ओह कंधे पर बल एफ के काम के बराबर है।
वैक्टर को चलो और पैटर्न विमान में स्थित हैं। वेक्टर कला संपत्ति के अनुसार, वेक्टर वैक्टर के लिए लंबवत है और, यह पैटर्न विमान के लिए लंबवत है। उनकी दिशा सही पेंच के शासन द्वारा निर्धारित की जाती है। तस्वीर में, पल वेक्टर हमें निर्देशित किया जाता है। इस समय का पूर्ण मूल्य:
.
तब से
(3)
.
ज्यामिति का उपयोग करके, आप बल के क्षण की एक और व्याख्या दे सकते हैं। ऐसा करने के लिए, पावर वेक्टर के माध्यम से सीधे आह खर्च करें। सेंट ओ से इस पर लंबवत ओह डालें। इस लंबवत की लंबाई कहा जाता है कंधे की शक्ति। फिर
(4)
.
चूंकि, सूत्र (3) और (4) समतुल्य हैं।
इस तरह, बल के क्षण का पूर्ण मूल्य केंद्र ओ बराबर के सापेक्ष कंधे पर काम करना यह बल चुने गए केंद्र ओ के सापेक्ष है।
पल की गणना करते समय यह अक्सर दो घटकों में शक्ति को विघटित करने के लिए सुविधाजनक होता है:
,
कहां है। पावर ओ के माध्यम से गुजरता है। इसलिए, इसका क्षण शून्य है। फिर
.
इस समय का पूर्ण मूल्य:
.
एक आयताकार समन्वय प्रणाली में क्षण घटक
यदि आप बिंदु ओ पर केंद्र के साथ ऑक्सीज आयताकार समन्वय प्रणाली का चयन करते हैं, तो बल के क्षण में निम्नलिखित घटक होंगे:
(5.1)
;
(5.2)
;
(5.3)
.
यहां - चयनित समन्वय प्रणाली में बिंदु ए के निर्देशांक:
.
घटक क्रमशः अक्षों के सापेक्ष बल के क्षण का मूल्य हैं।
केंद्र के सापेक्ष बल के क्षण के गुण
इस केंद्र के माध्यम से गुजरने वाली ताकत से केंद्र ओ के सापेक्ष पल शून्य है।
यदि बल के आवेदन का बिंदु बिजली वेक्टर के माध्यम से गुजरने वाली रेखा के साथ आगे बढ़ना है, तो इस समय, इस तरह के कदम के साथ, नहीं बदलेगा।
शरीर के एक बिंदु से जुड़ी बलों के वेक्टर का क्षण एक ही बिंदु से जुड़ी बलों में से प्रत्येक के क्षणों के वेक्टर योग के बराबर होता है:
.
वही उन बलों पर लागू होता है जिनकी निरंतरता रेखाएं एक बिंदु पर छेड़छाड़ करती हैं।
यदि शक्ति का वेक्टर योग शून्य है:
,
इन बलों के क्षणों का योग केंद्र की स्थिति पर निर्भर नहीं है जिसके बारे में क्षणों की गणना की जाती है:
.
शक्ति का एक जोड़ा
शक्ति का एक जोड़ा - ये पूर्ण मूल्य के बराबर दो शक्तियां हैं और शरीर के विभिन्न बिंदुओं से जुड़ी विपरीत दिशाएं हैं।
बलों की एक जोड़ी एक पल द्वारा विशेषता है। चूंकि जोड़ी में आने वाली बलों के वेक्टर योग शून्य है, एक जोड़ी द्वारा बनाए गए समय के सापेक्ष बिंदु पर निर्भर नहीं है जिसके लिए पल की गणना की जाती है। स्थैतिक संतुलन के दृष्टिकोण से, जोड़ी में शामिल बलों की प्रकृति से कोई फर्क नहीं पड़ता। यह इंगित करने के लिए कुछ ताकत का उपयोग किया जाता है कि शरीर में एक पल होता है जिसका एक निश्चित अर्थ होता है।
निर्दिष्ट धुरी के सापेक्ष बल का क्षण
अक्सर ऐसे मामले होते हैं जब हमें चयनित बिंदु के सापेक्ष बल के क्षण के सभी घटकों को जानने की आवश्यकता नहीं होती है, और आपको केवल चयनित अक्ष के सापेक्ष बल के क्षण को जानने की आवश्यकता होती है।
बिंदु ओ के माध्यम से गुजरने वाली धुरी के सापेक्ष शक्ति का क्षण अक्ष के क्षण के प्रक्षेपण है, जो दृष्टि ओ के सापेक्ष, धुरी की दिशा में है।
एक्सिस के सापेक्ष बल के क्षण की गुण
इस धुरी से गुजरने वाले बल से धुरी के सापेक्ष पल शून्य है।
इस धुरी के समानांतर ताकत से धुरी के सापेक्ष पल शून्य है।
एक्सिस के सापेक्ष बल के क्षण की गणना

शरीर को, बिंदु पर एक शक्ति का कार्य करने दें। हमें ओ'ओ की अक्ष के सापेक्ष इस शक्ति का क्षण मिलेगा।
हम एक आयताकार समन्वय प्रणाली का निर्माण करते हैं। ओज़ अक्ष को O'O के साथ मेल खाता है। बिंदु ए से, O'O पर लंबवत ओह डालें। अंक ओ और ए के बाद, हम बैल धुरी करते हैं। ऑक्स और ओज के लिए लंबवत ओवाई एक्सिस को ले जाते हैं। हम समन्वय प्रणाली की कुल्हाड़ियों के साथ घटकों पर शक्ति को विघटित करते हैं:
.
बल ओ'ओ की धुरी को पार करता है। इसलिए, इसका क्षण शून्य है। एक्सिस ओ'ओ 'के समानांतर बल। इसलिए, इसका क्षण भी शून्य है। फॉर्मूला द्वारा (5.3) हम पाते हैं:
.
ध्यान दें कि घटक का उद्देश्य परिधि के लिए टेंगेंट करना है, जिसका केंद्र बिंदु ओ है। वेक्टर की दिशा सही पेंच के शासन द्वारा निर्धारित की जाती है।
ठोस शरीर संतुलन
संतुलन में, शरीर पर अभिनय की सभी बलों का वेक्टर योग शून्य है और मनमाने ढंग से निश्चित केंद्र के सापेक्ष इन बलों के क्षणों का वेक्टर योग शून्य है:
(6.1)
;
(6.2)
.
हम इस बात पर जोर देते हैं कि केंद्र ओ, जिनके सापेक्ष बलों के क्षणों को मनमाने ढंग से चुना जा सकता है। बिंदु ओ, शरीर से संबंधित है और परे है। आमतौर पर गणना को आसान बनाने के लिए केंद्र ओ चुना जाता है।
संतुलन की स्थिति को दूसरे तरीके से तैयार किया जा सकता है।
संतुलन में, मनमाने वाले वेक्टर द्वारा परिभाषित किसी भी दिशा पर बलों के अनुमानों की मात्रा शून्य है:
.
मनमानी धुरी ओ'ओ के सापेक्ष बलों के क्षणों की राशि के बराबर भी शून्य के बराबर:
.
कभी-कभी ऐसी स्थितियां अधिक आरामदायक होती हैं। अक्षरों की पसंद के कारण ऐसे मामले हैं, आप गणना को आसान बना सकते हैं।
गुरुत्वाकर्षण शरीर का केंद्र
गुरुत्वाकर्षण के बल - सबसे महत्वपूर्ण ताकतों में से एक पर विचार करें। यहां शरीर के कुछ बिंदुओं पर बलों को लागू नहीं किया जाता है, लेकिन लगातार इसकी मात्रा से वितरित किया जाता है। शरीर के प्रत्येक शरीर पर एक असीम रूप से छोटी मात्रा के साथ Δ वी।, गुरुत्वाकर्षण का एक बल है। यहां ρ शरीर के शरीर की घनत्व है, मुक्त गिरावट का त्वरण।
चलो शरीर के एक असीम रूप से छोटे हिस्से का द्रव्यमान बनें। और बिंदु को एक के इस क्षेत्र की स्थिति निर्धारित करने दें। हमें गुरुत्वाकर्षण की ताकत से संबंधित मूल्य मिलते हैं, जो संतुलन समीकरण (6) में शामिल हैं।
हमें शरीर के सभी हिस्सों द्वारा गठित गुरुत्वाकर्षण बलों की मात्रा मिलती है:
,
जहां - शरीर का द्रव्यमान। इस प्रकार, शरीर के कुछ असीम रूप से छोटे हिस्सों की गुरुत्वाकर्षण का योग पूरे शरीर की गुरुत्वाकर्षण के एक वेक्टर द्वारा प्रतिस्थापित किया जा सकता है:
.
हम गुरुत्वाकर्षण के क्षणों का योग पाएंगे, चुने हुए केंद्र के अपेक्षाकृत मनमानी तरीके:
.
यहां हमने एक बिंदु सी पेश किया, जिसे कहा जाता है गंभीरता का केंद्र तन। गुरुत्वाकर्षण के केंद्र की स्थिति, केंद्र के साथ समन्वय प्रणाली में, सूत्र द्वारा निर्धारित किया जाता है:
(7)
.
इसलिए, स्थिर संतुलन को निर्धारित करते समय, शरीर के कुछ हिस्सों की गुरुत्वाकर्षण का योग एक रिश्तेदार के साथ प्रतिस्थापित किया जा सकता है
,
शरीर के शरीर के लिए लागू, जिस स्थिति को सूत्र (7) द्वारा निर्धारित किया जाता है।
विभिन्न ज्यामितीय आंकड़ों के लिए गुरुत्वाकर्षण के केंद्र की स्थिति प्रासंगिक संदर्भ पुस्तकों में पाया जा सकता है। यदि शरीर में एक धुरी या समरूपता का विमान होता है, तो गुरुत्वाकर्षण का केंद्र इस धुरी या विमान पर स्थित होता है। इसलिए, क्षेत्र, सर्कल या सर्कल की गंभीरता के केंद्र इन आंकड़ों की मंडलियों के केंद्रों में हैं। आयताकार समानांतरता के गुरुत्वाकर्षण के केंद्र, एक आयताकार या वर्ग भी उनके केंद्रों में स्थित हैं - विकर्णों के चौराहे के बिंदु पर।

समान रूप से (ए) और रैखिक (बी) वितरित भार।
ऐसे समान गुरुत्वाकर्षण मामले भी हैं जब शरीर के कुछ बिंदुओं पर बलों को लागू नहीं किया जाता है, लेकिन लगातार इसकी सतह या मात्रा पर वितरित किया जाता है। ऐसी ताकतों को बुलाया जाता है वितरित बलों या।
(चित्रा ए)। इसके अलावा, भारी गुरुत्वाकर्षण के मामले में, इसे ईपीूर के गुरुत्वाकर्षण के केंद्र में लागू आकार की बराबर बल के साथ प्रतिस्थापित किया जा सकता है। आंकड़े में, ईपीआर एक आयताकार है, फिर एपपुरा की गुरुत्वाकर्षण का केंद्र अपने केंद्र में है - बिंदु सी: | एसी | \u003d | सीबी |. (चित्रा बी)। इसे रिले के साथ भी बदला जा सकता है। साजिश के क्षेत्र के बराबर समानता:.
आवेदन का बिंदु एपुरा के गुरुत्वाकर्षण के केंद्र में स्थित है। त्रिभुज, ऊंचाई एच के गुरुत्वाकर्षण का केंद्र आधार से दूरी पर है। इसलिए।
घर्षण बल
सर्पी घर्षण। शरीर को एक सपाट सतह पर रहने दें। और बल, लंबवत सतह, जिसके साथ सतह शरीर (दबाव बल) पर कार्य करता है। फिर पीसने वाली बल सतह के समानांतर है और शरीर के आंदोलन को रोकने के लिए निर्देशित है। इसका सबसे बड़ा मूल्य है:
,
जहां एफ घर्षण गुणांक है। घर्षण गुणांक एक आयाम रहित मूल्य है।
रोलिंग घर्षण। गोलाकार रूप के शरीर को रोल करने दें या सतह पर रोल कर सकते हैं। और दबाव बल, सतह पर लंबवत जिसके साथ सतह शरीर पर कार्य करता है। फिर शरीर पर, सतह के संपर्क के बिंदु पर, घर्षण बलों का एक पल होता है जो शरीर के आंदोलन को रोकता है। घर्षण की सबसे बड़ी परिमाण के बराबर है:
,
जहां δ रोलिंग घर्षण गुणांक है। इसमें लंबाई का आयाम है।
संदर्भ:
एस एम। तारग, सैद्धांतिक यांत्रिकी का एक संक्षिप्त पाठ्यक्रम, "हायर स्कूल", 2010।