สมการหลักของพลวัตของจุดในกลศาสตร์ทฤษฎี ส่วนคงที่ของกลศาสตร์ทฤษฎี ความมุ่งมั่นของความเร็วที่แน่นอนและการเร่งความเร็วที่แน่นอนของประเด็น
Kinematics Point
1. เรื่องของกลศาสตร์ทฤษฎี abstractions พื้นฐาน
กลศาสตร์ทฤษฎี- นี่คือวิทยาศาสตร์ที่กฎหมายทั่วไปของการเคลื่อนไหวเชิงกลและการมีปฏิสัมพันธ์เชิงกลของวัตถุวัสดุ
การเคลื่อนไหวเชิงกล มันเรียกว่าการเคลื่อนไหวของร่างกายที่สัมพันธ์กับร่างกายอื่นที่เกิดขึ้นในอวกาศและเวลา
ปฏิสัมพันธ์เชิงกล มันถูกเรียกว่าการมีปฏิสัมพันธ์กับวัตถุวัสดุซึ่งเปลี่ยนลักษณะของการเคลื่อนไหวเชิงกลของพวกเขา
วิชาว่าด้วยวัตถุ - นี่คือส่วนของกลศาสตร์เชิงทฤษฎีซึ่งการศึกษาวิธีการในการเปลี่ยนแปลงของระบบความแข็งแรงให้กับระบบที่เทียบเท่าและกำหนดสภาพสมดุลที่ติดอยู่กับร่างกายที่เป็นของแข็ง
จลนศาสตร์ - ส่วนนี้ของกลศาสตร์ทฤษฎีที่ศึกษา การเคลื่อนไหวของวัตถุวัสดุในอวกาศจากมุมมองทางเรขาคณิตโดยไม่คำนึงถึงกองกำลังที่ทำหน้าที่พวกเขา
การเปลี่ยนแปลง - นี่คือส่วนของกลศาสตร์ที่การเคลื่อนไหวของวัตถุวัสดุในอวกาศขึ้นอยู่กับกองกำลังที่ทำหน้าที่กับพวกเขา
วัตถุของการศึกษาในกลศาสตร์เชิงทฤษฎี:
จุดวัสดุ
ระบบ Dot วัสดุ
ร่างกายที่มั่นคงอย่างแน่นอน
พื้นที่สัมบูรณ์และเวลาที่แน่นอนอย่างอิสระหนึ่งในอื่น ๆ อวกาศ - พื้นที่ยุคสามมิติที่เป็นเนื้อเดียวกันและเป็นเนื้อเดียวกัน เวลาแน่นอน - ไหลจากอดีตไปจนถึงอนาคตอย่างต่อเนื่องมันสม่ำเสมอในทุกจุดของพื้นที่และไม่ได้ขึ้นอยู่กับการเคลื่อนไหวของสสาร
2. เรื่องของ Kinematics
Kinematics - กลไกในส่วนนี้ซึ่งมีการศึกษาคุณสมบัติทางเรขาคณิตของการเคลื่อนไหวของร่างกายโดยไม่คำนึงถึงความเฉื่อยของพวกเขา (เช่นมวลชน) และกองกำลังทำหน้าที่พวกเขา
เพื่อกำหนดตำแหน่งของร่างกายที่เคลื่อนไหว (หรือจุด) กับร่างกายนั้นสัมพันธ์กับการเคลื่อนไหวของร่างกายนี้การศึกษาอย่างเหนียวแน่นผูกระบบพิกัดบางอย่างที่เกิดขึ้นพร้อมกับร่างกาย ระบบอ้างอิง
ภารกิจหลักของ Kinematics มันคือการรู้กฎของการเคลื่อนไหวของร่างกายนี้ (จุด) เพื่อตรวจสอบค่า Kinematic ทั้งหมดที่มีลักษณะการเคลื่อนไหว (ความเร็วและการเร่งความเร็ว)
3. วิธีการตั้งค่าการเคลื่อนไหวจุด
· วิธีธรรมชาติ
มันควรเป็นที่รู้จัก:
จุดเคลื่อนไหววิถี;
เริ่มต้นและทิศทางของการอ้างอิง;
กฎของการเคลื่อนไหวของจุดตามวิถีที่กำหนดในแบบฟอร์ม (1.1)
· วิธีการประสานงาน
สมการ (1.2) - สมการของการเคลื่อนไหวของ M.
สมการของวิถีของจุด m สามารถรับได้โดยไม่รวมพารามิเตอร์เวลา « ต. » จากสมการ (1.2)
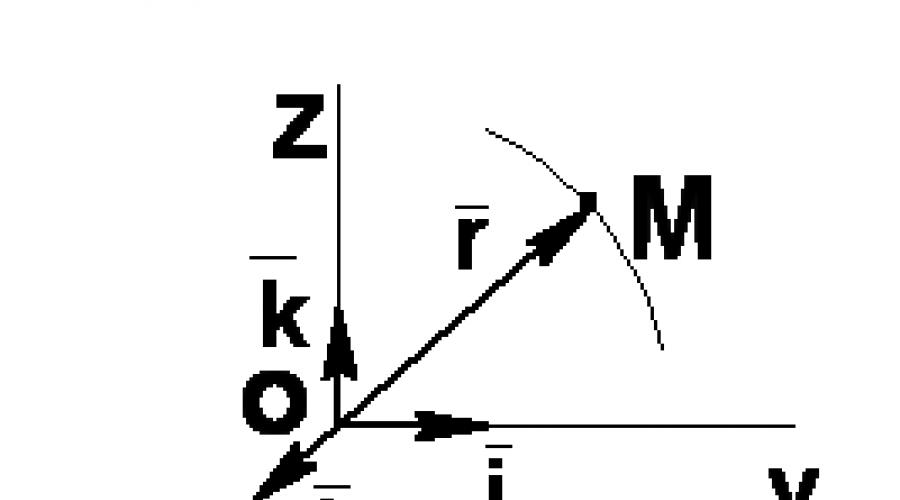
· แฟชั่นเวกเตอร์
|
|
(1.3) การสื่อสารระหว่างพิกัดและวิธีการเวกเตอร์ของจุดเคลื่อนไหวของจุด
|

การสื่อสารระหว่างการประสานงานและวิธีธรรมชาติของการจราจรเป้าหมาย
กำหนดเส้นทางจุดกำจัดเวลาจากสมการ (1.2);
-- ค้นหากฎของการเคลื่อนไหวของจุดตามเส้นทาง (ใช้นิพจน์เพื่อความแตกต่างของอาร์ค)
หลังจากการบูรณาการเราได้กฎการเคลื่อนไหวของจุดตามวิถีที่กำหนด:
ความสัมพันธ์ระหว่างการประสานงานและวิธีการเวกเตอร์ของจุดเคลื่อนไหวของจุดนั้นถูกกำหนดโดยสมการ (1.4)
4. การกำหนดความเร็วของจุดในวิธีการเวกเตอร์ในการตั้งค่าการเคลื่อนไหว
ปล่อยเวลาต.ตำแหน่งของจุดถูกกำหนดโดยรัศมี - เวกเตอร์และในช่วงเวลาของเวลาต. 1
- รัศมี - เวกเตอร์แล้วเมื่อเวลาผ่านไป ![]() จุดที่จะย้าย
จุดที่จะย้าย
|
|
จุดเฉลี่ยของจุด กำกับเวกเตอร์เช่นเดียวกับเวกเตอร์
|

 (1.5)
(1.5)
จุดจุด ณ เวลาที่กำหนด
เพื่อให้ได้ความเร็วของจุดในขณะนี้มีความจำเป็นต้อง จำกัด
 (1.6)
(1.6)
(1.7)
เวกเตอร์ความเร็วจุดในปัจจุบัน มันเท่ากับอนุพันธ์แรกของรัศมี - เวกเตอร์ในเวลาและมีวัตถุประสงค์เพื่อสัมผัสกับวิถีในจุดนี้
(หน่วย¾ M / S, KM / H)
การเร่งความเร็วกลางเวกเตอร์ มีทิศทางเดียวกันกับเวกเตอร์Δ v. นั่นคือจุดมุ่งหมายต่อความคืบหน้าของวิถี
จุดเร่งของเวกเตอร์ในเวลาที่กำหนด มันเท่ากับอนุพันธ์แรกของเวกเตอร์ Velocity หรืออนุพันธ์ที่สองของรัศมี - เวกเตอร์จุดในเวลา
หน่วยวัด -)
เวกเตอร์สัมพันธ์กับจุดวิถีอย่างไร
ด้วยการเคลื่อนที่ของเส้นตรงเวกเตอร์ถูกนำไปตามโดยตรงซึ่งจะย้ายประเด็น หากวิถีเส้นทางเป็นเส้นโค้งแบนจากนั้นความเร็วในการเร่งความเร็วเช่นเดียวกับเวกเตอร์ของพุธที่อยู่ในระนาบของเส้นโค้งนี้และถูกชี้นำไปสู่ความเห็นศีรษะ หากวิถีไม่เป็นเส้นโค้งแบนเวกเตอร์ของ CP จะถูกนำไปสู่ความคืบหน้าของวิถีและจะอยู่ในระนาบที่ผ่านสัมผัสกับ Tangent ไปที่เส้นทางที่จุดเอ็ม และตรงไปด้วยกันขนานในจุดต่อไปm 1. . ใน จำกัด เมื่อจุดm 1. พยายามที่จะ เอ็ม เครื่องบินลำนี้ใช้ตำแหน่งของระนาบสัมผัสที่เรียกว่า ดังนั้นในกรณีทั่วไปเวกเตอร์ความเร่งจึงอยู่ในระนาบสัมผัสและนำไปสู่การฝากของเส้นโค้ง
ภายในกรอบการฝึกอบรมใด ๆ การศึกษาฟิสิกส์เริ่มต้นด้วยกลศาสตร์ ไม่ได้มีทฤษฎีไม่ใช่ด้วยการใช้งานและไม่ใช้คอมพิวเตอร์ แต่ด้วยกลศาสตร์คลาสสิกที่ดีเก่า กลศาสตร์นี้เรียกว่ากลศาสตร์นิวตัน ตามตำนานนักวิทยาศาสตร์เดินไปรอบ ๆ สวนได้เห็นแอปเปิ้ลฟอลส์และเป็นปรากฏการณ์นี้ที่ผลักเขาเข้าสู่การเปิดโลกของโลกแห่งโลก แน่นอนว่ากฎหมายมีอยู่เสมอและนิวตันเพียงให้เขาเป็นรูปแบบที่เข้าใจได้ แต่บุญของเขามีค่ามาก ในบทความนี้เราจะไม่ทาสีกฎหมายของกลไกของนิวตันในรายละเอียดมากที่สุดเท่าที่จะเป็นไปได้ แต่ระบุพื้นฐานความรู้พื้นฐานคำจำกัดความและสูตรที่สามารถเล่นในมือของคุณได้ตลอดเวลา
กลศาสตร์ - ส่วนของฟิสิกส์วิทยาศาสตร์ที่ศึกษาการเคลื่อนไหวของวัตถุวัสดุและการมีปฏิสัมพันธ์ระหว่างพวกเขา
คำว่าตัวเองมีต้นกำเนิดกรีกและแปลว่า "เครื่องสร้างศิลปะ" แต่ก่อนที่จะสร้างรถยนต์เรายังคงต้องการดวงจันทร์ดังนั้นเราไปข้างบนฝีเท้าของบรรพบุรุษของเราและเราจะศึกษาการเคลื่อนไหวของหินที่โยนมุมไปที่ขอบฟ้าและแอปเปิ้ลที่ตกลงมาบนหัวจากความสูง H

เหตุใดการศึกษาฟิสิกส์จึงเริ่มต้นด้วยกลไก เพราะมันเป็นธรรมชาติอย่างสมบูรณ์ไม่ใช่จากความสมดุลทางอุณหพลศาสตร์เพื่อเริ่มมัน?!
กลศาสตร์เป็นหนึ่งในวิทยาศาสตร์ที่เก่าแก่ที่สุดและฟิสิกส์การเรียนรู้ในอดีตเริ่มต้นด้วยพื้นฐานของกลศาสตร์ วางไว้ในกรอบเวลาและพื้นที่ผู้คนในความเป็นจริงไม่สามารถเริ่มต้นด้วยสิ่งอื่นด้วยความปรารถนาทั้งหมด Moving Bodies - สิ่งแรกที่เราให้ความสนใจของคุณ
การเคลื่อนไหวคืออะไร?
การเคลื่อนไหวเชิงกลเป็นการเปลี่ยนแปลงในตำแหน่งของร่างกายในอวกาศที่สัมพันธ์กันเมื่อเวลาผ่านไป
มันเป็นหลังจากนิยามนี้ที่เรามาถึงแนวคิดของระบบอ้างอิงอย่างเป็นธรรมชาติ การเปลี่ยนตำแหน่งของร่างกายในอวกาศที่สัมพันธ์กับกันและกัน คำสำคัญที่นี่: ญาติ ๆ . ท้ายที่สุดผู้โดยสารในรถเคลื่อนที่ค่อนข้างยืนอยู่ข้างสนามของบุคคลในความเร็วที่แน่นอนและวางอยู่บนเพื่อนบ้านของเขาบนที่นั่งใกล้เคียงและเคลื่อนที่ด้วยความเร็วอื่น ๆ ที่สัมพันธ์กับผู้โดยสารในรถที่แซงพวกเขา

นั่นคือเหตุผลที่เพื่อวัดพารามิเตอร์ของวัตถุที่เคลื่อนไหวตามปกติและไม่สับสนเราต้องการ ระบบอ้างอิงคือการนับถอยหลังที่เกี่ยวข้องอย่างเข้มงวดระบบพิกัดและนาฬิกา ตัวอย่างเช่นโลกเคลื่อนที่ไปรอบ ๆ ดวงอาทิตย์ในระบบอ้างอิง Heli-centered ในการวัดเกือบทั้งหมดเราใช้จ่ายในระบบอ้างอิง Geocentric ที่เกี่ยวข้องกับโลก โลกนี้เป็นร่างกายอ้างอิงที่สัมพันธ์กับรถยนต์ที่กำลังเคลื่อนย้ายเครื่องบินผู้คนสัตว์

กลศาสตร์เช่นวิทยาศาสตร์มีงานของตัวเอง งานของกลศาสตร์ - ตลอดเวลาที่จะรู้ตำแหน่งของร่างกายในอวกาศ กล่าวอีกนัยหนึ่งช่างกำลังสร้างคำอธิบายทางคณิตศาสตร์เกี่ยวกับการเคลื่อนไหวและค้นหาความสัมพันธ์ระหว่างปริมาณทางกายภาพซึ่งมีลักษณะ
เพื่อที่จะย้ายต่อไปเราจะต้องมีแนวคิด " จุดวัสดุ . พวกเขาพูดว่าฟิสิกส์ - วิทยาศาสตร์ที่แม่นยำ แต่นักฟิสิกส์รู้ว่าการประมาณจำนวนและสมมติฐานต้องทำเพื่อประสานงานความแม่นยำนี้มากเพียงใด ไม่มีใครเคยเห็นจุดวัสดุและไม่ได้กลิ่นก๊าซที่สมบูรณ์แบบ แต่พวกเขา! พวกเขาใช้ชีวิตได้ง่ายขึ้นมาก
จุดวัสดุคือร่างกายขนาดและรูปแบบที่ในบริบทของงานนี้สามารถละเลยได้
ส่วนของกลศาสตร์คลาสสิก
กลศาสตร์ประกอบด้วยหลายส่วน
- จลนศาสตร์
- การเปลี่ยนแปลง
- วิชาว่าด้วยวัตถุ
จลนศาสตร์จากมุมมองทางกายภาพเขาศึกษาว่าร่างกายเคลื่อนที่ กล่าวอีกนัยหนึ่งส่วนนี้มีส่วนร่วมในลักษณะเชิงปริมาณของการเคลื่อนไหว ค้นหาความเร็วเส้นทาง - ปัญหาการจลนศาสตร์ทั่วไป
การเปลี่ยนแปลง ตัดสินใจคำถามว่าทำไมมันถึงเคลื่อนที่ด้วยวิธีนี้ นั่นคือถือว่ากองกำลังทำหน้าที่อยู่บนร่างกาย
วิชาว่าด้วยวัตถุ เขาศึกษาความสมดุลของร่างกายภายใต้การกระทำของกองกำลังนั่นคือคำตอบคำถาม: ทำไมมันไม่ตกเลย?
ขอบเขตของการบังคับใช้กลศาสตร์คลาสสิก
กลไกคลาสสิกไม่ได้อ้างถึงสถานะของวิทยาศาสตร์ที่อธิบายทุกอย่าง (ในช่วงต้นศตวรรษที่ผ่านมาทุกอย่างแตกต่างกันอย่างสิ้นเชิง) และมีขอบเขตการบังคับใช้ที่ชัดเจน โดยทั่วไปกฎหมายของกลศาสตร์คลาสสิกค่อนข้างคุ้นเคยกับเราในขนาดของโลก (Macromir) พวกเขาหยุดทำงานในกรณีของโลกของอนุภาคเมื่อกลไกควอนตัมมาแทนที่คลาสสิก นอกจากนี้กลศาสตร์คลาสสิกไม่สามารถใช้ได้กับกรณีเมื่อการเคลื่อนไหวของร่างกายเกิดขึ้นที่ความเร็วใกล้กับความเร็วแสง ในกรณีเช่นนี้เอฟเฟกต์ relativistic กลายเป็นเด่นชัด การพูดอย่างคร่าว ๆ ภายในกรอบของกลศาสตร์ควอนตัมและฟอร์แมต - กลศาสตร์คลาสสิกนี่เป็นกรณีพิเศษเมื่อขนาดของร่างกายมีขนาดใหญ่และความเร็วมีขนาดเล็ก

การพูดโดยทั่วไปเอฟเฟกต์ควอนตัมและสัโต้ได้ไม่เคยไปทุกที่พวกเขามีสถานที่ที่จะเป็นและด้วยการเคลื่อนไหวปกติของวัตถุ macroscopic ด้วยความเร็วความเร็วที่ต่ำกว่ามาก อีกสิ่งหนึ่งคือผลกระทบของผลกระทบเหล่านี้น้อยมากที่ไม่ได้ไปเกินกว่าการวัดที่แม่นยำที่สุด กลศาสตร์คลาสสิกดังนั้นจะไม่สูญเสียความสำคัญขั้นพื้นฐาน
เราจะศึกษารากฐานทางกายภาพต่อไปในบทความต่อไปนี้ต่อไป เพื่อความเข้าใจที่ดีขึ้นเกี่ยวกับกลศาสตร์ที่คุณสามารถติดต่อได้เสมอ ผู้เขียนของเราซึ่งสลับแสงเป็นรายบุคคลบนจุดมืดของงานที่ยากที่สุด
ทฤษฎีทั่วไปของลำโพงของระบบร่างกาย ทฤษฎีเกี่ยวกับการเคลื่อนไหวของศูนย์กลางของมวลประมาณการเปลี่ยนปริมาณการเคลื่อนไหวเกี่ยวกับการเปลี่ยนจุดหลักของปริมาณการเคลื่อนไหวเกี่ยวกับการเปลี่ยนพลังงานจลน์ หลักการของ Dalambert และการเคลื่อนไหวที่เป็นไปได้ สมการทั่วไปของลำโพง สมการ lagrange
เนื้อหางานที่กำลังทำ เท่ากับผลิตภัณฑ์สเกลาร์ของเวกเตอร์ความแข็งแรงและการเคลื่อนไหวเล็ก ๆ เล็กน้อยของประยุกต์ใช้:
,
นั่นคือผลิตภัณฑ์ของโมดูลของเวกเตอร์ F และ DS บนโคไซน์ของมุมระหว่างพวกเขา
ทำงานที่ช่วงเวลาของกองกำลัง เท่ากับผลิตภัณฑ์สเกลาร์ของเวกเตอร์แรงบิดและมุมการหมุนขนาดเล็กอย่างไม่สิ้นสุด:
.
หลักการของ Dalamber
สาระสำคัญของหลักการของ Dalamber คือการมอบหมายให้ผู้พูดเพื่อลดภารกิจแบบคงที่ สำหรับสิ่งนี้จะถือว่า (หรือเป็นที่รู้จักกันล่วงหน้า) ว่าร่างกายของระบบมีการเร่งความเร็ว (เชิงมุม) บางอย่าง ถัดไปมีการแนะนำความเฉื่อยและ (หรือ) ช่วงเวลาของกองกำลังความเฉื่อยซึ่งมีขนาดเท่ากันและย้อนกลับในทิศทางของกองกำลังและช่วงเวลาของกองกำลังซึ่งตามกฎหมายของกลศาสตร์จะสร้างการเร่งความเร็วที่ระบุหรือ การเร่งความเร็วเชิงมุม
พิจารณาตัวอย่าง เส้นทางของร่างกายมุ่งมั่นการเคลื่อนไหวการแปลและกองกำลังภายนอกทำหน้าที่ ต่อไปเราคิดว่ากองกำลังเหล่านี้สร้างการเร่งความเร็วของศูนย์กลางของระบบมวล ตามทฤษฎีเกี่ยวกับการเคลื่อนไหวของศูนย์กลางของมวลชนของมวลของร่างกายจะมีการเร่งความเร็วเดียวกันหากมีการดำเนินการพลังงานบนร่างกาย ต่อไปเราแนะนำพลังของความเฉื่อย:
.
หลังจากนั้นงานของลำโพง:
.
;
.
สำหรับการเคลื่อนไหวแบบหมุนมาในลักษณะเดียวกัน ปล่อยให้ร่างกายหมุนรอบแกน z และมีช่วงเวลาภายนอกของ m e zk สำหรับมัน เราคิดว่าช่วงเวลาเหล่านี้สร้างความเร่งเชิงมุมε z ต่อไปเราแนะนำช่วงเวลาของกองกำลังของความเฉื่อย M และ \u003d - J Z ε Z หลังจากนั้นงานของลำโพง:
.
เปลี่ยนเป็นภารกิจของแบบคงที่:
;
.
หลักการเคลื่อนไหวที่เป็นไปได้
หลักการของการเคลื่อนไหวที่เป็นไปได้ใช้ในการแก้ปัญหาแบบสถิตยัตร ในบางงานมันให้การแก้ปัญหาที่สั้นกว่าการวาดสมการสมการ นี่เป็นเรื่องจริงโดยเฉพาะอย่างยิ่งของระบบที่มีการเชื่อมต่อ (ตัวอย่างเช่นเนื้อหาที่เชื่อมต่อด้วยเธรดและบล็อก) ประกอบด้วยวัตถุจำนวนมาก
หลักการเคลื่อนไหวที่เป็นไปได้.
สำหรับความสมดุลของระบบเครื่องจักรกลที่มีพันธะอุดมคติมีความจำเป็นและเพียงพอที่ผลรวมของงานระดับประถมศึกษาของกองกำลังที่ใช้งานทั้งหมดที่ทำหน้าที่กับการเคลื่อนไหวของระบบที่เป็นไปได้นั้นเป็นศูนย์
การเคลื่อนไหวที่เป็นไปได้ของระบบ - นี่คือการเคลื่อนไหวเล็ก ๆ ที่การเชื่อมต่อที่กำหนดไว้ในระบบจะไม่ถูกละเมิด
การเชื่อมต่อที่เหมาะ - นี่คือการเชื่อมต่อที่ไม่ทำงานเมื่อเคลื่อนย้ายระบบ แม่นยำยิ่งขึ้นจำนวนงานที่ดำเนินการโดยการเชื่อมต่อตัวเองเมื่อระบบกำลังเคลื่อนที่เป็นศูนย์
สมการทั่วไปของลำโพง (หลักการของ Dalamber - Lagrange)
หลักการของ Dalamber - Lagrange เป็นความสัมพันธ์ของหลักการของ Dalambert กับหลักการของการเคลื่อนไหวที่เป็นไปได้ นั่นคือเมื่อแก้ปัญหาของพลวัตเราแนะนำกองกำลังความเฉื่อยและลดงานของสถิติที่เราแก้ปัญหาด้วยความช่วยเหลือของหลักการของการเคลื่อนไหวที่เป็นไปได้
หลักการของ Dalamber - Lagrange.
เมื่อย้ายระบบเครื่องจักรกลที่มีพันธะที่เหมาะในแต่ละช่วงเวลาผลรวมของงานระดับประถมศึกษาของกองกำลังที่ใช้งานทั้งหมดและแรงเฉื่อยทั้งหมดในการเคลื่อนย้ายระบบใด ๆ ที่เป็นไปได้ของระบบ:
.
สมการนี้เรียกว่า สมการโดยรวมของลำโพง.
สมการ lagrange
พิกัดทั่วไป Q. 1, Q 2, ... , Q N - นี่คือการรวมกันของค่า n ที่กำหนดตำแหน่งของระบบอย่างไม่ชัดเจน
จำนวนพิกัดทั่วไป n เกิดขึ้นพร้อมกับจำนวนองศาอิสระของระบบ
ความเร็วทั่วไป - สิ่งเหล่านี้ได้มาจากพิกัดทั่วไปของเวลา t
กองกำลังทั่วไป Q. 1, Q 2, ... , Q N
.
พิจารณาการเคลื่อนไหวที่เป็นไปได้ของระบบที่พิกัด Q K จะได้รับการเคลื่อนไหวδq k พิกัดที่เหลือยังคงไม่เปลี่ยนแปลง ให้δa k เป็นงานที่ดำเนินการโดยกองกำลังภายนอกด้วยการเคลื่อนไหวดังกล่าว จากนั้น
δa k \u003d q k δq k หรือ
.
หากมีการเคลื่อนไหวที่เป็นไปได้ของระบบพิกัดทั้งหมดมีการเปลี่ยนแปลงงานที่ดำเนินการโดยกองกำลังภายนอกด้วยการย้ายดังกล่าวมีแบบฟอร์ม:
δa \u003d Q. 1 δQ 1 + Q 2 δq 2 + ... + Q n δq n.
จากนั้นกองกำลังทั่วไปเป็นอนุพันธ์บางส่วนจากการเคลื่อนไหวงาน:
.
สำหรับกองกำลังที่มีศักยภาพ ด้วยศักยภาพπ,
.
สมการ lagrange - นี่คือสมการของระบบเครื่องจักรกลในพิกัดทั่วไป:
ที่นี่ t เป็นพลังงานจลน์ มันเป็นฟังก์ชั่นของพิกัดทั่วไปความเร็วและอาจเป็นเวลา ดังนั้นอนุพันธ์ส่วนตัวของมันจึงเป็นหน้าที่ของพิกัดทั่วไปความเร็วและเวลา ถัดไปมีความจำเป็นต้องพิจารณาว่าพิกัดและความเร็วเป็นฟังก์ชั่นของเวลา ดังนั้นเพื่อค้นหาอนุพันธ์ที่สมบูรณ์แบบในเวลาคุณต้องใช้กฎความแตกต่างของฟังก์ชั่นที่ซับซ้อน:
.
ข้อมูลอ้างอิง:
S. M. Targ หลักสูตรสั้น ๆ ของกลศาสตร์ทฤษฎี "โรงเรียนมัธยม", 2010
หลักสูตรนี้ได้รับการพิจารณา: Kinematics ของจุดและร่างกายที่เป็นของแข็ง (และจากมุมมองที่แตกต่างกันมันเสนอให้พิจารณาปัญหาของการวางแนวของที่มั่นคง) งานคลาสสิกของการเปลี่ยนแปลงของระบบเครื่องจักรกลและพลวัตของร่างกายที่เป็นของแข็ง องค์ประกอบของกลศาสตร์ท้องฟ้าการเคลื่อนไหวของระบบองค์ประกอบตัวแปรทฤษฎีของผลกระทบสมการเชิงอนุพันธ์ของการเปลี่ยนแปลงการวิเคราะห์
ส่วนทั้งหมดของกลศาสตร์ทฤษฎีทั้งหมดจะถูกนำเสนอ แต่ความสนใจเป็นพิเศษจะจ่ายให้กับการพิจารณาของทฤษฎีและการใช้งานที่มีคุณค่ามากที่สุดสำหรับพลวัตและวิธีการของกลไกการวิเคราะห์ สถิตถูกศึกษาเป็นส่วนของลำโพงและในส่วน Kinematics แนวคิดและเครื่องมือทางคณิตศาสตร์ได้รับการแนะนำในรายละเอียด
ทรัพยากรที่ให้ข้อมูล
Gantmakher F.r. การบรรยายเกี่ยวกับกลศาสตร์การวิเคราะห์ - 3rd ed - ม.: Fizmatlit, 2001
zhuravleov v.f. พื้นฐานของกลศาสตร์ทฤษฎี - 2nd ed. - ม.: Fizmatlit, 2001; 3rd ed. - ม.: Fizmatlit, 2008
Markeev A.p. กลศาสตร์ทฤษฎี - มอสโก - Izhevsk: NIC "พลวัตปกติและวุ่นวาย", 2007
ความต้องการ
หลักสูตรนี้ออกแบบมาสำหรับนักเรียนที่มีรูปทรงเรขาคณิตเชิงวิเคราะห์และพีชคณิตเชิงเส้นในขอบเขตของหลักสูตรแรกของมหาวิทยาลัยเทคนิค
โปรแกรมหลักสูตร
1. คะแนน Kinematics
1.1 งานจลนศาสตร์ ระบบพิกัดของ Decartova การสลายตัวของเวกเตอร์โดยพื้นฐาน orthonormal RADIUS เวกเตอร์และพิกัดจุด ความเร็วและจุดเร่งความเร็ว วิถีการเคลื่อนไหว
1.2 ทริกเกอร์ธรรมชาติ การสลายตัวของความเร็วและการเร่งความเร็วในแกนของธรรมชาติสามเหลี่ยมธรรมชาติ (ทฤษฎีบท Guigens)
1.3 พิกัดโค้งของจุดตัวอย่าง: ขั้วโลก, ทรงกระบอกและระบบพิกัดทรงกลม ส่วนประกอบและการคาดการณ์ของการเร่งความเร็วบนแกนของระบบพิกัด Curvilinear
2. วิธีในการกำหนดทิศทางของร่างกายที่เป็นของแข็ง
2.1 ของแข็ง ระบบพิกัดแบบคงที่และผูกพัน
2.2 เมทริกซ์เทิร์นมุมฉากและคุณสมบัติของพวกเขา ทฤษฎีบทออยเลอร์เกี่ยวกับการเลี้ยวสุดท้าย
2.3 มุมมองที่ใช้งานและเรื่อย ๆ ในการเปลี่ยนแปลงมุมฉาก การเพิ่มผลัดกัน
2.4 มุมของการหมุน จำกัด : มุมของออยเลอร์และมุม "เครื่องบิน" การแสดงออกของเมทริกซ์มุมฉากผ่านมุมของการหมุนที่ จำกัด
3. การเคลื่อนไหวเชิงพื้นที่ของของแข็ง
3.1 การเคลื่อนที่ป้องกันและการหมุนของร่างกายที่เป็นของแข็ง ความเร็วมุมและการเร่งเชิงมุม
3.2 การกระจายความเร็วของ Velocities (สูตรออยเลอร์) และการเร่งความเร็ว (สูตรคู่แข่ง) ของจุดแข็ง
3.3 ค่าธรรมเนียม Kinematic สกรูจลนศาสตร์ แกนสกรูทันที
4. การเคลื่อนไหวแบบขนานแบน
4.1 แนวคิดของการเคลื่อนไหวของร่างกายขนาน ความเร็วมุมและความเร่งเชิงมุมในกรณีของการเคลื่อนไหวแบบขนานของเครื่องบิน ศูนย์ความเร็วทันที
5. การเคลื่อนไหวที่ซับซ้อนของจุดและร่างกายที่เป็นของแข็ง
5.1 ระบบพิกัดคงที่และเคลื่อนย้าย การเคลื่อนไหวจุดที่แน่นอนญาติและพกพา
5.2 ทฤษฎีบทในการเพิ่มความเร็วที่มีการเคลื่อนไหวที่ซับซ้อนของจุดความสัมพันธ์และความเร็วแบบพกพา ทฤษฎีบท Coriolis เกี่ยวกับการเติมเร่งด้วยการเคลื่อนไหวที่ซับซ้อนของจุดที่เกี่ยวข้องแบบพกพาและการเร่งความเร็ว Coriolis
5.3 ความเร็วเชิงลึกสัมพัทธ์และแบบพกพาและการเร่งความเร็วเชิงมุมของร่างกาย
6. การเคลื่อนไหวของของแข็งด้วยจุดคงที่ (การนำเสนอ Quaternion)
6.1 แนวคิดของตัวเลขที่ซับซ้อนและ hypercomplex quaternions พีชคณิต ทำงาน Quaternion contamed และย้อนกลับ Quaternion, บรรทัดฐานและโมดูล
6.2 การเป็นตัวแทนตรีโกณมิติของ Quaternion เดียว วิธี Quaternion ในการตั้งค่าการเปิดร่างกาย ทฤษฎีบทออยเลอร์เกี่ยวกับการเลี้ยวสุดท้าย
6.3 การสื่อสารระหว่างคอมโพเนนต์ Quaternion ในฐานที่แตกต่างกัน การเพิ่มผลัดกัน พารามิเตอร์ Rodriga Hamilton
7. งานตรวจสอบ
8. แนวคิดพื้นฐานของพลวัต
8.1 ชีพจรช่วงเวลาของแรงกระตุ้น (ช่วงเวลาจินติน) พลังงานจลน์
8.2 พลังของกองกำลังความพยายามในการทำงานศักยภาพและพลังงานเต็มที่
8.3 ระบบ Mass Center (Inertia) ช่วงเวลาของความเฉื่อยของระบบที่เกี่ยวข้องกับแกน
8.4 ช่วงเวลาของความเฉื่อยเมื่อเทียบกับแกนขนาน Guiggens-Steiner ทฤษฎีบท
8.5 ทินเตอร์และจุดไข่ปลาความเฉื่อย แกนหลักของความเฉื่อย คุณสมบัติของช่วงเวลาตามแนวแกนความเฉื่อย
8.6 การคำนวณช่วงเวลาของแรงกระตุ้นและพลังงานแสงจลิกด้วยเทนเซอร์ความเฉื่อย
9. ทฤษฎีบทลำโพงหลักในระบบอ้างอิงเฉื่อยและไม่เฉื่อย
9.1 ทฤษฎีบทในการเปลี่ยนแปลงในระบบแรงกระตุ้นในระบบอ้างอิงเฉื่อย ทฤษฎีบทในการเคลื่อนไหวของศูนย์กลางของมวล
9.2 ทฤษฎีบทในการเปลี่ยนช่วงเวลาของระบบชีพจรในระบบอ้างอิงเฉื่อย
9.3 ทฤษฎีบทในการเปลี่ยนแปลงพลังงานจลน์ของระบบในระบบอ้างอิงเฉื่อย
9.4 ศักยภาพการหมุนเวียนและการกระจายตัว
9.5 ทฤษฎีบทลำโพงหลักในระบบอ้างอิงที่ไม่ชื้น
10. การเคลื่อนไหวของร่างกายที่เป็นของแข็งด้วยจุดคงที่ด้วยความเฉื่อย
10.1 สมการออยเลอร์แบบไดนามิก
10.2 กรณีออยเลอร์อินทิกรัลแรกของสมการแบบไดนามิก; การหมุนถาวร
10.3 การตีความ Ponaso และ McKoull
10.4 ความแม่นยำปกติในกรณีของสมมาตรแบบไดนามิกของร่างกาย
11. การเคลื่อนไหวของร่างกายแข็งหนักที่มีจุดคงที่
11.1 การตั้งค่าทั่วไปของการเคลื่อนไหวของแข็งหนัก ๆ
จุดคงที่ สมการออยเลอร์แบบไดนามิกและอินทิกรัลแรกของพวกเขา
11.2 การวิเคราะห์เชิงคุณภาพของการเคลื่อนไหวที่มั่นคงในกรณีของ Lagrange
11.3 บังคับให้มีความแม่นยำปกติของร่างกายที่เป็นของแข็งสมมาตรแบบไดนามิก
11.4 สูตร gyroscopy พื้นฐาน
11.5 แนวคิดของทฤษฎีประถมศึกษาของ Gyroscopes
12. พลวัตในฟิลด์กลาง
12.1 สมการ BINA
12.2 สมการ Orbita กฎหมายเคปเลอร์
12.3 งานกระเจิง
12.4 งานสองโทร. สมการของการเคลื่อนไหว Integral of Square, Integral Energy, Laplace Integral
13. การเปลี่ยนแปลงของระบบองค์ประกอบตัวแปร
13.1 แนวคิดพื้นฐานและทฤษฎีบทในการเปลี่ยนค่าแบบไดนามิกขั้นพื้นฐานในระบบองค์ประกอบที่แปรผัน
13.2 การเคลื่อนที่ของมวลตัวแปรวัสดุ
13.3 สมการของการเคลื่อนไหวของร่างกายขององค์ประกอบตัวแปร
14. ทฤษฎีการเคลื่อนไหวหุนหันพลันแล่น
14.1 แนวคิดพื้นฐานและสัจพจน์ของการเคลื่อนไหวหุนหันพลันแล่น
14.2 ทฤษฎีเกี่ยวกับการเปลี่ยนแปลงในค่าแบบไดนามิกขั้นพื้นฐานในการเคลื่อนไหวหุนหันพลันแล่น
14.3 การเคลื่อนไหวของเฟิร์มแวลหุนหันพลันแล่น
14.4 การปะทะกันของร่างกายที่เป็นของแข็งสองตัว
14.5 ทฤษฎีของคาร์โน
15. การตรวจสอบ
ผลการเรียนรู้
อันเป็นผลมาจากการพัฒนาวินัยนักเรียนจะต้อง:
- ทราบ:
- แนวคิดหลักและทฤษฎีของกลศาสตร์และวิธีการศึกษาการเคลื่อนไหวของระบบเครื่องจักรกลที่เกิดจากพวกเขา
- สามารถ:
- กำหนดปัญหาอย่างถูกต้องในแง่ของกลศาสตร์ทฤษฎี;
- พัฒนาแบบจำลองเชิงกลและคณิตศาสตร์สะท้อนให้เห็นถึงคุณสมบัติพื้นฐานของปรากฏการณ์ที่อยู่ระหว่างการพิจารณาอย่างเพียงพอ
- ใช้ความรู้ที่ได้รับเพื่อแก้ปัญหาเฉพาะที่สอดคล้องกัน
- เป็นเจ้าของ:
- ทักษะในการแก้ปัญหาคลาสสิกของกลศาสตร์ทฤษฎีและคณิตศาสตร์
- ทักษะในการศึกษาปัญหาของกลไกและการสร้างแบบจำลองเชิงกลและคณิตศาสตร์ที่อธิบายถึงปรากฏการณ์เชิงกลที่หลากหลาย
- ทักษะการใช้วิธีการและหลักการของกลไกทางทฤษฎีในการแก้ปัญหา: การคำนวณพลังงานการกำหนดลักษณะ Kinematic ของร่างกายที่มีวิธีการต่าง ๆ ในการกำหนดการเคลื่อนไหวการกำหนดกฎของการเคลื่อนไหวของวัตถุวัสดุและระบบเครื่องจักรกลภายใต้การกระทำของ กองกำลัง;
- ทักษะอย่างอิสระเชี่ยวชาญใหม่ในกระบวนการของกิจกรรมอุตสาหกรรมและวิทยาศาสตร์โดยใช้เทคโนโลยีการศึกษาและข้อมูลที่ทันสมัย
ภายใต้สภาวะสมดุลในสแตติกเป็นที่เข้าใจว่าเป็นรัฐที่ทุกส่วนของระบบกลไกส่วนที่เหลืออยู่ที่เกี่ยวข้องกับระบบพิกัดเฉื่อยบางอย่าง หนึ่งในวัตถุสถิติพื้นฐานคือจุดแข็งและจุดของแอปพลิเคชันของพวกเขา
แรงที่ทำหน้าที่ในจุดวัสดุที่มีเวกเตอร์รัศมีจากจุดอื่นคือการวัดผลของจุดอื่น ๆ ในประเด็นที่อยู่ระหว่างการพิจารณาอันเป็นผลมาจากการเร่งความเร็วที่เกี่ยวข้องกับระบบอ้างอิงเฉื่อย ค่า กองกำลัง กำหนดโดยสูตร:
,
โดยที่ M คือจุดของจุด - ค่าขึ้นอยู่กับคุณสมบัติของจุดเอง สูตรนี้เรียกว่ากฎข้อที่สองของนิวตัน
การประยุกต์ใช้สถิติในการเปลี่ยนแปลง
คุณสมบัติที่สำคัญของสมการการเคลื่อนไหวที่เป็นไปได้อย่างเท่าเทียมกันคือกองกำลังสามารถแปลงเป็นระบบที่เทียบเท่า ด้วยการแปลงสมการการเคลื่อนไหวนี้จะถูกเก็บรักษาไว้ แต่ระบบของกองกำลังที่ทำหน้าที่ในร่างกายสามารถแปลงเป็นระบบที่ง่ายกว่า ดังนั้นจุดของการประยุกต์ใช้แรงสามารถเคลื่อนย้ายไปตามแนวของมัน กองกำลังสามารถวางตามกฎของสี่เหลี่ยมด้านขนาน; กองกำลังที่แนบมา ณ จุดหนึ่งสามารถถูกแทนที่ด้วยผลรวมทางเรขาคณิตของพวกเขา
ตัวอย่างของการเปลี่ยนแปลงดังกล่าวคือพลังของแรงโน้มถ่วง มันทำหน้าที่ในทุกจุดของของแข็ง แต่กฎหมายของการเคลื่อนไหวของร่างกายจะไม่เปลี่ยนแปลงหากแรงโน้มถ่วงกระจายไปทั่วทุกจุดจะถูกแทนที่ด้วยเวกเตอร์เดียวที่ใช้ในศูนย์กลางของตัวมวล
ปรากฎว่าถ้าเราไปที่ระบบหลักของกองกำลังที่ทำหน้าที่อยู่ในร่างกายเพิ่มระบบที่เทียบเท่าซึ่งทิศทางของกองกำลังจะเปลี่ยนเป็นสิ่งที่ตรงกันข้ามร่างกายภายใต้การกระทำของระบบเหล่านี้จะเป็นดุลยภาพ ดังนั้นภารกิจในการกำหนดระบบที่เทียบเท่าของกองกำลังจะลดลงตามความสมดุลซึ่งเป็นปัญหาของสถิตยศาสตร์
งานหลักของคงที่ เป็นการจัดตั้งกฎหมายสำหรับการแปลงระบบของกองกำลังเป็นระบบที่เทียบเท่า ดังนั้นวิธีการของสถิตยศาสตร์จึงใช้ไม่เพียง แต่เมื่อศึกษาร่างกายในความสมดุล แต่ยังอยู่ในการเปลี่ยนแปลงของของแข็งเมื่อการแปลงความแข็งแรงในระบบที่ง่ายกว่าที่ง่ายกว่า
จุดวัสดุคงที่
พิจารณาจุดวัสดุที่อยู่ในสมดุล และปล่อยให้มันมีแรง n, k \u003d 1, 2, ... , N.
หากจุดวัสดุอยู่ในสมดุลผลรวมเวกเตอร์ของความแข็งแรงที่ทำหน้าที่เป็นศูนย์:
(1)
.
ในความสมดุลผลกระทบทางเรขาคณิตของกองกำลังที่ทำหน้าที่เป็นศูนย์
การตีความทางเรขาคณิต. หากในตอนท้ายของเวกเตอร์แรกที่จะวางจุดเริ่มต้นของเวกเตอร์ที่สองและในตอนท้ายของเวกเตอร์ที่สองเพื่อจุดเริ่มต้นของที่สามและดำเนินการต่อกระบวนการนี้ต่อไปตอนท้ายของเวกเตอร์ N -GO จะถูกรวมเข้ากับจุดเริ่มต้นของเวกเตอร์แรก นั่นคือเราจะได้รับรูปทรงเรขาคณิตที่ปิดความยาวของด้านที่เท่ากับโมดูลของเวกเตอร์ หากเวกเตอร์ทั้งหมดอยู่ในระนาบเดียวกันเราจะได้รูปหลายเหลี่ยมปิด
มักจะสะดวกในการเลือก ระบบพิกัดสี่เหลี่ยม oxyz จากนั้นปริมาณการฉายภาพของเวกเตอร์ความแข็งแรงทั้งหมดบนแกนของพิกัดเป็นศูนย์:
หากคุณเลือกทิศทางใดก็ได้ตามที่กำหนดโดยเวกเตอร์บางส่วนจากนั้นผลรวมของการฉายภาพของกองกำลังสำหรับทิศทางนี้เป็นศูนย์:
.
สมการคูณ (1) สเกลาร์ไปยังเวกเตอร์:
.
นี่คือผลิตภัณฑ์สเกลาร์ของเวกเตอร์และ
โปรดทราบว่าการฉายภาพของเวกเตอร์ในทิศทางของเวกเตอร์ถูกกำหนดโดยสูตร:
.
แข็งคงที่
ช่วงเวลาของพลังงานที่สัมพันธ์กับจุด
การกำหนดช่วงเวลาของพลังงาน
ช่วงเวลาแห่งอำนาจ นำไปใช้กับร่างกายที่จุด A สัมพันธ์กับศูนย์คงที่ o เรียกว่าเวกเตอร์เท่ากับผลิตภัณฑ์เวกเตอร์ของเวกเตอร์และ:(2) .
การตีความทางเรขาคณิต

ช่วงเวลาของความแข็งแรงเท่ากับการทำงานของแรง f บนไหล่โอ้
ปล่อยให้เวกเตอร์และตั้งอยู่ในระนาบลวดลาย ตามที่อสังหาริมทรัพย์เวกเตอร์ศิลปะเวกเตอร์ตั้งฉากกับเวกเตอร์และนั่นคือตั้งฉากกับระนาบลวดลาย ทิศทางของเขาถูกกำหนดโดยกฎของสกรูที่ถูกต้อง ในภาพช่วงเวลาที่เวกเตอร์ถูกนำไปยังเรา ค่าสัมบูรณ์ของช่วงเวลา:
.
ตั้งแต่นั้น
(3)
.
การใช้รูปทรงเรขาคณิตคุณสามารถตีความในช่วงเวลาของการบังคับ ในการทำเช่นนี้ใช้จ่ายโดยตรง AH ผ่านเวกเตอร์พลังงาน จาก Cent O ใส่ฉากตั้งฉากโอ้ตรงนี้ ความยาวของการตั้งฉากนี้เรียกว่า พลังงานไหล่. จากนั้น
(4)
.
ตั้งแต่สูตร (3) และ (4) เทียบเท่า
ทางนี้, ค่าสัมบูรณ์ของช่วงเวลาของการบังคับ สัมพันธ์กับศูนย์ o เท่ากับ ทำงานบนไหล่ แรงนี้สัมพันธ์กับศูนย์กลางที่เลือก O.
เมื่อคำนวณช่วงเวลาที่สะดวกในการย่อยสลายพลังงานเป็นสององค์ประกอบ:
,
ที่ไหน. พลังงานผ่านจุด O. ดังนั้นช่วงเวลาของมันจึงเป็นศูนย์ จากนั้น
.
ค่าสัมบูรณ์ของช่วงเวลา:
.
ส่วนประกอบช่วงเวลาในระบบพิกัดสี่เหลี่ยม
หากคุณเลือกระบบพิกัดสี่เหลี่ยม Oxyz ที่มีศูนย์กลางที่จุด O จากนั้นช่วงเวลาของการบังคับใช้จะมีส่วนประกอบต่อไปนี้:
(5.1)
;
(5.2)
;
(5.3)
.
ที่นี่ - พิกัดของจุด A ในระบบพิกัดที่เลือก:
.
ส่วนประกอบเป็นค่าของช่วงเวลาของการบังคับให้เทียบกับแกนตามลำดับ
คุณสมบัติของช่วงเวลาแห่งการบังคับให้สัมพันธ์กับศูนย์
ช่วงเวลาที่สัมพันธ์กับศูนย์ o จากความแข็งแรงที่ผ่านไปที่ศูนย์กลางนี้เป็นศูนย์
หากจุดของการประยุกต์ใช้แรงคือการเคลื่อนที่ไปตามแนวผ่านเวกเตอร์พลังงานช่วงเวลาที่มีการเคลื่อนไหวดังกล่าวจะไม่เปลี่ยนแปลง
ช่วงเวลาของเวกเตอร์ของกองกำลังที่ติดอยู่กับจุดหนึ่งของร่างกายเท่ากับผลรวมเวกเตอร์ของช่วงเวลาจากแต่ละกองกำลังที่ติดอยู่กับจุดเดียวกัน:
.
เช่นเดียวกับกองกำลังที่มีสายต่อเนื่องตัดต่อไปที่จุดหนึ่ง
หากผลรวมเวกเตอร์ของความแข็งแรงเป็นศูนย์:
,
ผลรวมของช่วงเวลาจากกองกำลังเหล่านี้ไม่ได้ขึ้นอยู่กับตำแหน่งของศูนย์เกี่ยวกับช่วงเวลาที่คำนวณได้:
.
พลังสองสาม
พลังสองสาม - เหล่านี้เป็นสองกองกำลังเท่ากับค่าสัมบูรณ์และมีทิศทางตรงกันข้ามกับจุดที่แตกต่างกันของร่างกาย
กองกำลังคู่หนึ่งโดดเด่นในช่วงเวลาที่พวกเขาสร้าง เนื่องจากผลรวมเวกเตอร์ของกองกำลังขาเข้าในคู่เป็นศูนย์เวลาที่สร้างขึ้นโดยคู่ไม่ได้ขึ้นอยู่กับจุดที่เกี่ยวข้องกับช่วงเวลาที่คำนวณได้ จากมุมมองของดุลยภาพแบบคงที่ลักษณะของกองกำลังที่รวมอยู่ในทั้งคู่ไม่สำคัญ มีความแข็งแรงสองสามอย่างเพื่อระบุว่าร่างกายมีช่วงเวลาที่มีความหมายบางอย่าง
ช่วงเวลาของแรงที่สัมพันธ์กับแกนที่ระบุ
บ่อยครั้งที่มีบางกรณีเมื่อเราไม่จำเป็นต้องรู้ส่วนประกอบทั้งหมดของช่วงเวลาของการบังคับให้เทียบกับจุดที่เลือกและคุณต้องรู้เฉพาะช่วงเวลาของการบังคับให้เทียบกับแกนที่เลือก
ช่วงเวลาของพลังงานที่สัมพันธ์กับแกนที่ผ่านจุด o คือการฉายภาพของช่วงเวลาของแรงที่สัมพันธ์กับจุด o ทิศทางของแกน
คุณสมบัติของช่วงเวลาของการบังคับให้เทียบกับแกน
ช่วงเวลาที่สัมพันธ์กับแกนจากแรงที่ผ่านแกนนี้เป็นศูนย์
ช่วงเวลาที่สัมพันธ์กับแกนจากความแข็งแรงขนานกับแกนนี้เป็นศูนย์
การคำนวณช่วงเวลาของการบังคับให้เทียบกับแกน

ปล่อยให้ร่างกาย ณ จุดหนึ่งทำหน้าที่พลัง เราจะพบช่วงเวลาของพลังงานนี้เมื่อเทียบกับแกนของโอโอ
เราสร้างระบบพิกัดรูปสี่เหลี่ยมผืนผ้า ให้แกน OZ เกิดขึ้นพร้อมกับ O'O ' จากจุด A ให้วางแนวตั้งฉากโอ้โอโอะ '' หลังจากจุด O และ A เราดำเนินการแกนวัว ตั้งฉากกับ OX และ OZ ดำเนินการแกน OY เราสลายพลังบนส่วนประกอบตามขวานของระบบพิกัด:
.
แรงข้ามแกนของโอโอ ดังนั้นช่วงเวลาของมันจึงเป็นศูนย์ แรงขนานกับแกนโอโอ '' ดังนั้นช่วงเวลาของมันก็เป็นศูนย์ โดยสูตร (5.3) เราค้นหา:
.
โปรดทราบว่าส่วนประกอบมีวัตถุประสงค์เพื่อสัมผัสกับเส้นรอบวงซึ่งเป็นจุดศูนย์กลางของ ทิศทางของเวกเตอร์ถูกกำหนดโดยกฎของสกรูที่ถูกต้อง
สมดุลของร่างกายที่เป็นของแข็ง
ในความสมดุลผลรวมเวกเตอร์ของกองกำลังทั้งหมดที่ทำหน้าที่อยู่ในร่างกายเป็นศูนย์และผลรวมเวกเตอร์ของช่วงเวลาของกองกำลังเหล่านี้ที่เกี่ยวข้องกับศูนย์คงที่โดยพลการเป็นศูนย์:
(6.1)
;
(6.2)
.
เราเน้นว่าศูนย์ o ญาติซึ่งสามารถเลือกช่วงเวลาของกองกำลังได้โดยพลการ จุดที่ o สามารถเป็นของร่างกายและเกิน โดยปกติแล้วศูนย์ o จะถูกเลือกเพื่อให้การคำนวณง่ายขึ้น
เงื่อนไขความสมดุลสามารถสูตรได้ในทางอื่น
ในความสมดุลปริมาณของการคาดการณ์ของกองกำลังในทุกทิศทางที่กำหนดโดยเวกเตอร์โดยพลการเป็นศูนย์:
.
นอกจากนี้ยังเท่ากับศูนย์ผลรวมของช่วงเวลาของกองกำลังที่สัมพันธ์กับแกนอักษะ '' '' ':
.
บางครั้งเงื่อนไขดังกล่าวสะดวกสบายมากขึ้น มีบางกรณีเมื่อมีการเลือกแกนคุณสามารถคำนวณได้ง่ายขึ้น
ศูนย์กลางของร่างกายแรงโน้มถ่วง
พิจารณาหนึ่งในกองกำลังที่สำคัญที่สุด - แรงโน้มถ่วง ที่นี่กองกำลังจะไม่ถูกนำไปใช้ในบางจุดของร่างกาย แต่กระจายอย่างต่อเนื่องโดยปริมาตร ในแต่ละร่างกายของร่างกายด้วยปริมาณขนาดเล็กที่ไม่สิ้นสุด δ Vมีแรงโน้มถ่วง ที่นี่ρเป็นความหนาแน่นของร่างกายของร่างกายการเร่งความเร็วของการตกฟรี
ปล่อยให้เป็นมวลของส่วนเล็ก ๆ ที่ไม่สิ้นสุดของร่างกาย และให้จุดที่ K กำหนดตำแหน่งของเว็บไซต์นี้ เราพบค่านิยมที่เกี่ยวข้องกับความแข็งแรงของแรงโน้มถ่วงซึ่งรวมอยู่ในสมการสมดุล (6)
เราพบว่าปริมาณแรงโน้มถ่วงที่เกิดขึ้นจากทุกส่วนของร่างกาย:
,
ที่ไหน - มวลของร่างกาย ดังนั้นผลรวมของแรงโน้มถ่วงของชิ้นส่วนขนาดเล็กบางส่วนสามารถถูกแทนที่ด้วยเวกเตอร์หนึ่งของแรงโน้มถ่วงของร่างกายทั้งหมด:
.
เราจะพบผลรวมของช่วงเวลาของแรงโน้มถ่วงซึ่งเป็นวิธีที่ค่อนข้างเด็ดขาดของศูนย์ o:
.
ที่นี่เราแนะนำจุด C ซึ่งเรียกว่า ศูนย์กลางของความรุนแรง ร่างกาย. ตำแหน่งของศูนย์กลางของแรงโน้มถ่วงในระบบพิกัดที่มีศูนย์ ณ จุด o กำหนดโดยสูตร:
(7)
.
ดังนั้นเมื่อพิจารณาความสมดุลแบบคงที่ผลรวมของแรงโน้มถ่วงของบางส่วนของร่างกายสามารถเปลี่ยนได้ด้วยญาติ
,
นำไปใช้กับร่างกายของร่างกาย C ตำแหน่งที่กำหนดโดยสูตร (7)
ตำแหน่งของศูนย์กลางของแรงโน้มถ่วงสำหรับตัวเลขทางเรขาคณิตต่าง ๆ สามารถพบได้ในหนังสืออ้างอิงที่เกี่ยวข้อง หากร่างกายมีแกนหรือระนาบของสมมาตรศูนย์กลางของแรงโน้มถ่วงตั้งอยู่บนแกนหรือเครื่องบินนี้ ดังนั้นศูนย์กลางของความรุนแรงของทรงกลมวงกลมหรือวงกลมอยู่ในศูนย์ของแวดวงของตัวเลขเหล่านี้ ศูนย์กลางของแรงโน้มถ่วงของสี่เหลี่ยมขนานกันเป็นรูปสี่เหลี่ยมผืนผ้าสี่เหลี่ยมหรือสี่เหลี่ยมจัตุรัสยังตั้งอยู่ในใจกลางของพวกเขา - ณ จุดตัดของเส้นทแยงมุม

โหลดอย่างสม่ำเสมอ (A) และ Linearly (B) การโหลดแบบกระจาย
นอกจากนี้ยังมีกรณีแรงโน้มถ่วงที่คล้ายกันเมื่อกองกำลังไม่ได้ใช้ในบางจุดของร่างกาย แต่มีการกระจายอย่างต่อเนื่องผ่านพื้นผิวหรือปริมาตร กองกำลังดังกล่าวเรียกว่า กองกำลังแจกจ่าย หรือ .
(รูปก) นอกจากนี้ในกรณีที่มีแรงโน้มถ่วงหนักสามารถเปลี่ยนได้ด้วยแรงที่เท่ากันของขนาดที่ใช้ในศูนย์กลางของแรงโน้มถ่วงของ Epur ตั้งแต่ในรูป Epur เป็นรูปสี่เหลี่ยมผืนผ้าจากนั้นจุดศูนย์ถ่วงของ Eppura อยู่ในจุดศูนย์กลาง - จุด C: | ac | \u003d | cb |. (รูป b) นอกจากนี้ยังสามารถแทนที่ด้วยรีเลย์ ขนาดเท่ากันเท่ากับพื้นที่ของพล็อต:.
จุดของแอปพลิเคชันตั้งอยู่ในใจกลางของแรงโน้มถ่วงของ Epura ศูนย์กลางของแรงโน้มถ่วงของสามเหลี่ยมความสูง H อยู่ในระยะไกลจากฐาน ดังนั้น.
แรงเสียดทาน
แรงเสียดทานเลื่อน. ปล่อยให้ร่างกายอยู่บนพื้นผิวที่เรียบ และปล่อยให้แรงพื้นผิวตั้งฉากซึ่งพื้นผิวทำหน้าที่บนร่างกาย (แรงดัน) จากนั้นแรงบดจะขนานกับพื้นผิวและมุ่งไปที่การป้องกันการเคลื่อนไหวของร่างกาย ค่าที่ยิ่งใหญ่ที่สุดคือ:
,
โดยที่ f คือค่าสัมประสิทธิ์แรงเสียดทาน ค่าสัมประสิทธิ์แรงเสียดทานเป็นค่าที่ไม่มีขนาด
แรงเสียดทานกลิ้ง. ปล่อยให้ร่างกายของรูปแบบโค้งม้วนหรือสามารถม้วนพื้นผิว และปล่อยให้แรงกดดันตั้งฉากกับพื้นผิวที่พื้นผิวทำหน้าที่บนร่างกาย จากนั้นในร่างกาย ณ จุดที่สัมผัสกับพื้นผิวมีช่วงเวลาของแรงเสียดทานที่ป้องกันการเคลื่อนไหวของร่างกาย ขนาดที่ยิ่งใหญ่ที่สุดของแรงเสียดทานเท่ากับ:
,
ที่δคือค่าสัมประสิทธิ์แรงเสียดทานกลิ้ง มันมีมิติของความยาว
ข้อมูลอ้างอิง:
S. M. Targ หลักสูตรสั้น ๆ ของกลศาสตร์ทฤษฎี "โรงเรียนมัธยม", 2010